Команда студентов Стэнфордского университета разработала робота-пса Stanford Doggo, который умеет танцевать, прыгать и выполнять различные трюки. Создатели роботизированного четвероногого друга утверждают, что собственный экземпляр может собрать каждый фанат робототехники и биомиметики, так как все детали можно приобрести онлайн.

Участие в разработке прототипов Stanford Doggo принимали студенты старших курсов и аспиранты Стэнфордского университета, которые состоят в клубе «Extreme Mobility». Работа над последней версией робота-пса продолжалась на протяжении полутора лет: она оказалась настолько успешной, что его создатели решили поделиться своими наработками в сети. Схему сборки Doggo, список необходимых деталей и коды, используемые для программирования робота на выполнения различных задач, они разместили на платформе GitHub – крупнейшем веб-сервисе для хостинга IT-проектов и их совместной разработки.


Члены клуба «Extreme Mobility» оценивают стоимость всех необходимых для робота деталей в 3 тысячи долларов – с учётом производства и доставки деталей и гарнитуры. Stanford Doggo представляет собой машину размером с обувную коробку (42 на 20 см) и весом менее пяти килограммов, которая передвигается на четырёх лапах и способна преодолевать практически любые формы рельефа. Предыдущие версии робопса могли прыгать на высоту до 60 см, а новый экземпляр скачет почти в два раза выше. Даже базовое ПО позволяет роботу выполнять различные акробатические трюки, однако при желании его можно научить не только задорно скакать, но и выполнять любые задачи, добавив нужные коды и детали.
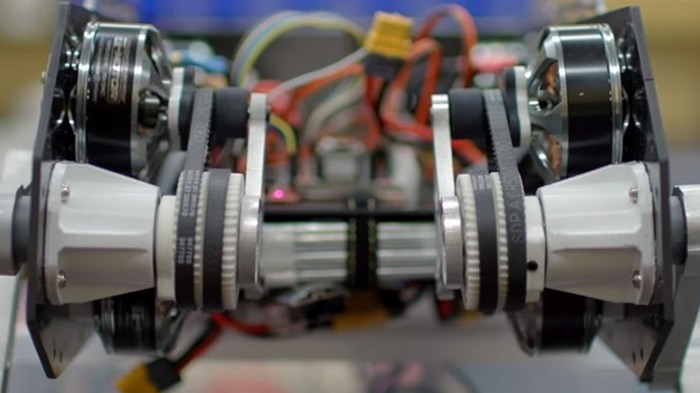


Каждая «лапа» Stanford Doggo состоит из четырёх взаимосвязанных элементов. В основании ног располагаются по два двигателя, которые соединены с верхними сегментами – с помощью подобной архитектуры робот может двигать ногой в любом направлении в пределах одной плоскости. Более того, такая конструкция позволяет использовать моторчики в качестве виртуальной пружины, которая регистрирует силу давления на ноги робота и избавляет от необходимости оборудовать робопса дополнительными амортизирующими элементами. Координацией движений робота управляет центральный компьютер, связанный с моторчиками и множественными сенсорами: обновление данных происходит со скоростью 8 тысяч раз в секунду, потому Stanford Doggo мгновенно адаптируется к любому положению собственного тела и не теряет равновесие после выполнения хитрых трюков.
При разработке робопса инженеры ориентировались на доступность материалов и относительную лёгкость сборки конструкции. Члены клуба «Extreme Mobility» отказались от тестирования отдельных соединений и готовой конструкции при помощи симуляции, вместо этого функционирование каждого элемента они проверяли на практике. Большинство деталей изготовлены при помощи 3D-печати или гидроабразивной резки, покупателям остаётся лишь собрать их, следуя размещённой на GitHub схеме, и сделать прошивку готового робота.

Патрик Слэйд – аспирант аэронавтики и астронавтики, который также работал над созданием робота, надеется, что в будущем Stanford Doggo найдёт более широкое применение, например, в поисково-спасательных операциях или в качестве курьера, и сможет заменить людей в опасных профессиях. Для подобных целей помимо Stanford Doggo скоро станет доступным и более крупный робот, который получил название Stanford Woofer. Woofer примерно в два раза больше робопса и может переносить около 6 килограммов. Оба робота активно участвуют в работе лаборатории клуба «Extreme Mobility», например, подносят небольшие приборы и детали для других проектов.

Stanford Doggo – далеко не первая попытка учёных создать роботизированного четвероногого друга. Над подобными проектами работают также в Массачусетском Технологическом Институте и нескольких частных компаниях. Несмотря на довольно высокую конкуренцию в сфере создания четвероногих роботов, стэнфордского Doggo считают наиболее гармоничным в соотношении цены и качества.