Людство стало на крок ближче до автоматизованої хірургії: дослідники з Університету Джонса Гопкінса навчили робота SRT-H (Surgical Robot Transformer-Hierarchy) проводити видалення жовчного міхура без будь-якої фізичної підтримки, виключно за голосовими командами. Робот засвоїв матеріал з численних відео хірургічних втручань та відтворив їх на практиці, виконавши холецистектомію на симуляторі з коригуванням роботи в режимі реального часу.

SRT-H – це яскравий приклад справжнього прориву у медичній галузі, який демонструє не тільки механічну точність, але також значно складнішу здатність адаптуватися до обставин: не дотримуватися лінійного сценарію, але коригувати поведінку у момент, коли це необхідно для досягнення результату. Варто зазначити, що, хоча це дослідження детально описує процедуру видалення жовчного міхура роботом під час восьми хірургічних втручань, усі вони були виконані на гіперреалістичних людиноподібних моделях, а не на справжніх людях. Проте ці моделі використовують тканини, які максимально близько імітують людські, і SRT-H чудово впорався з кожним з 17 етапів холецистектомії. Наприклад, робот зміг ідентифікувати конкретні протоки та артерії, а також взаємодіяти з ними: стратегічно розміщувати кліпси, робити розрізи у правильних місцях тощо. Відео процедури можна переглянути на каналі одного з авторів дослідження Juo-Tung Chen.

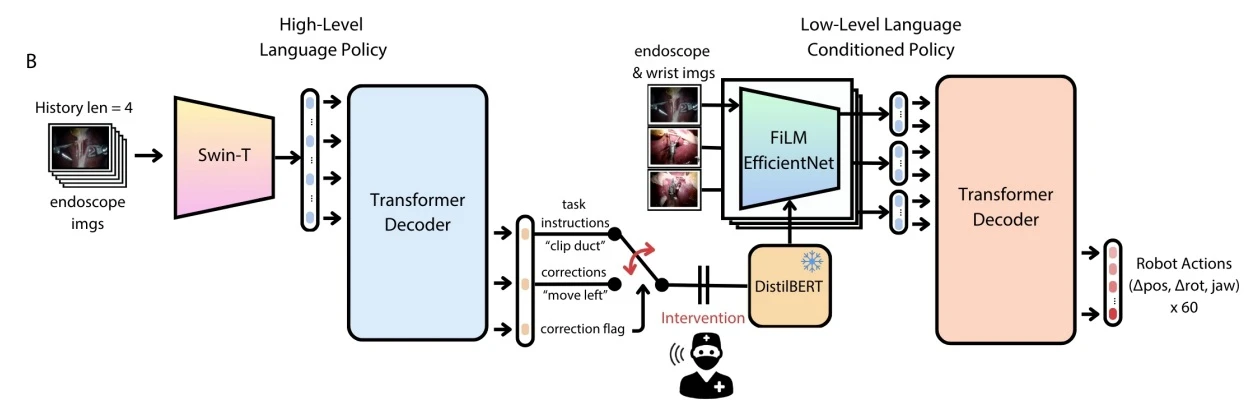
За словами провідного автора дослідження Цзі-вунга «Брайана» Кіма, робота його команди репрезентує дуже значний крок від попередніх надбань у галузі роботизованої хірургії, оскільки вона демонструє подолання низки фундаментальних перешкод для розгортання автономних хірургічних роботів у реальному світі. Насамперед вона розкриває перспективи використання штучного інтелекту як достатньо надійного інструмента досягнення хірургічної автономії. Ба більше, SRT-H використовує ту саму архітектуру машинного навчання, що й ChatGPT, тому робот може реагувати на голосові команди медичного персоналу, що спостерігає за роботом, виправляючи його та навчаючись у режимі реального часу. Отже, хоча підґрунтям для його базового навчання є відео та симуляція операції, він також має гнучкість для вдосконалення своїх навичок на ходу, подібно до хірурга-людини. До речі, раніше роботу вдалося досягти 100% успіху у холецистектомії на тваринних моделях (а саме на тілах свиней).
 Галузь хірургічної робототехніки розвивається так само швидко, як і сам штучний інтелект. Наприклад, рік тому команда вчених з Університету Джонса Гопкінса навчила робота виконувати найважливіше тріо хірургічних завдань: маніпуляції з голкою, переміщення тканин тіла та накладання швів. Машина опанувала ці навички за лічені секунди. А до цього, у 2022 році, автономний робот STAR (Smart Tissue Autonomous Robot) від Krieger провів першу автономну роботу-операцію на живій тварині – лапароскопічну операцію на свині. Проте тоді ця процедура потребувала значно більшої участі медичного персоналу, який позначив тканини, щоб робот міг дотримуватися чітко визначеного плану. З новою ШІ-моделлю SRT-H має набагато вищий ступінь незалежності, а також вміння орієнтуватися в ситуації та реагувати на все, з чим він стикається. Далі Кім та його команда планують розширити спектр навичок робота, щоб той міг засвоїти протоколи різноманітних операцій та стати ще більш автономним, аби в майбутньому проводити операції без нагляду чи зворотного зв’язку.
Галузь хірургічної робототехніки розвивається так само швидко, як і сам штучний інтелект. Наприклад, рік тому команда вчених з Університету Джонса Гопкінса навчила робота виконувати найважливіше тріо хірургічних завдань: маніпуляції з голкою, переміщення тканин тіла та накладання швів. Машина опанувала ці навички за лічені секунди. А до цього, у 2022 році, автономний робот STAR (Smart Tissue Autonomous Robot) від Krieger провів першу автономну роботу-операцію на живій тварині – лапароскопічну операцію на свині. Проте тоді ця процедура потребувала значно більшої участі медичного персоналу, який позначив тканини, щоб робот міг дотримуватися чітко визначеного плану. З новою ШІ-моделлю SRT-H має набагато вищий ступінь незалежності, а також вміння орієнтуватися в ситуації та реагувати на все, з чим він стикається. Далі Кім та його команда планують розширити спектр навичок робота, щоб той міг засвоїти протоколи різноманітних операцій та стати ще більш автономним, аби в майбутньому проводити операції без нагляду чи зворотного зв’язку.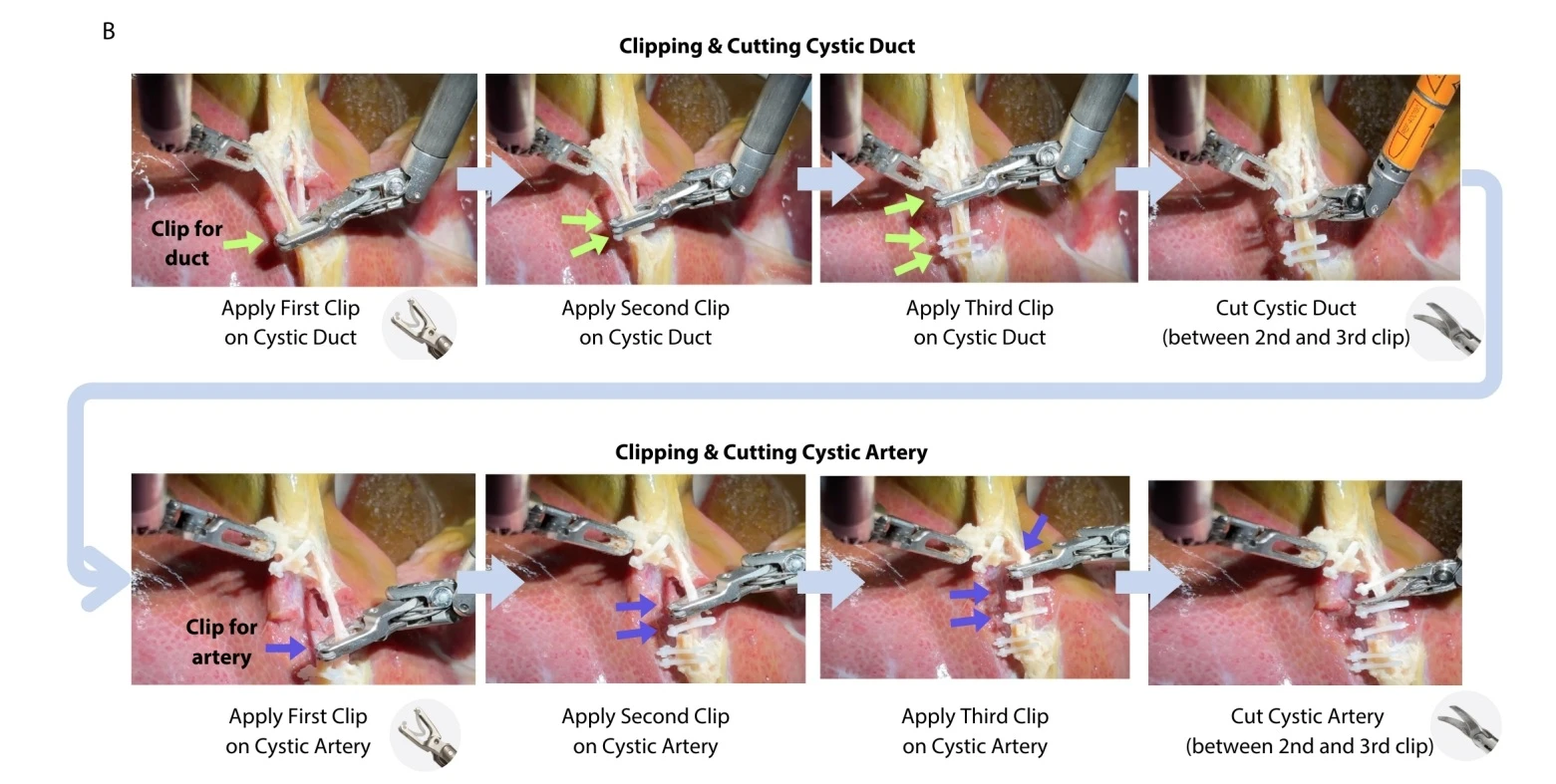 Джерело: SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning / JI WOONG (BRIAN) KIM at al.
Джерело: SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning / JI WOONG (BRIAN) KIM at al.