Команда исследователей из Городского университета Гонконга разработала новый мягкий тактильный сенсор, способный имитировать чувствительность кожи на подушечках пальцев. По словам разработчиков, роботизированная рука, оборудованная подобным сенсором, сможет выполнять тончайшие манипуляции – крепко фиксировать хрупкие объекты или заправлять нить в иголку.
Одной из важнейших характеристик человеческой кожи является возможность осязать силу сдвига – то есть силу, необходимую для перемещения одной поверхности вещества по другой параллельной поверхности. Наша кожа чувствует малейшие изменения усилия, направления и прочих значений, позволяя мгновенно адаптировать хватку в зависимости от особенностей удерживаемого объекта. Для имитации отзывчивости кожи доктор Шэнь Яцзин и его коллеги с кафедры биомедицинского инженирования из Городского университета Гонконга разработали инновационный мягкий тактильный сенсор. Этот датчик представляет собой многослойную структуру, одним из ключевых компонентов которой является гибкая намагниченная плёнка толщиной 0,5 мм.
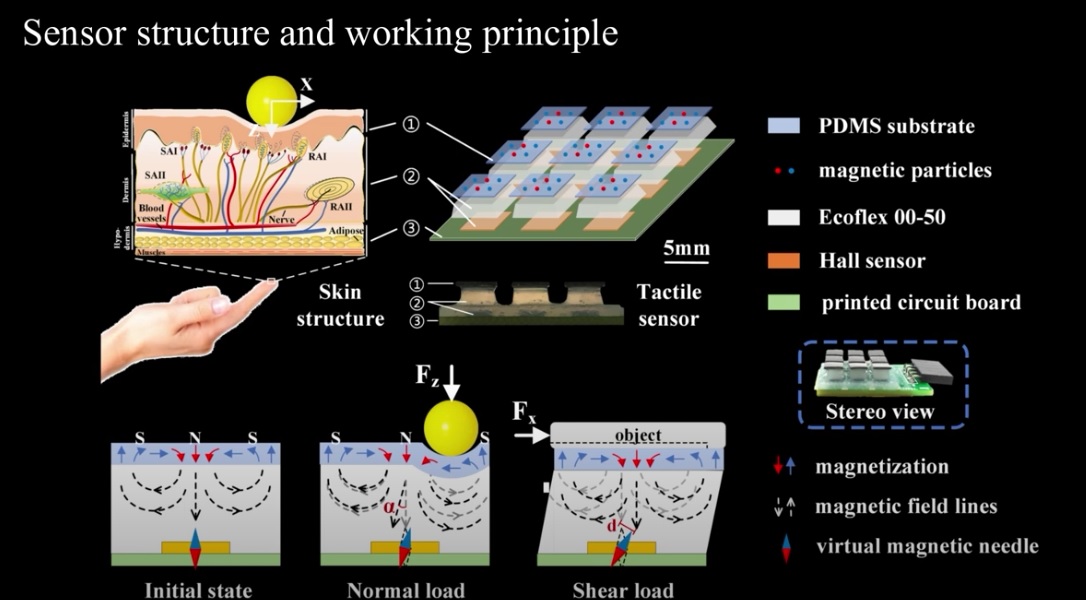
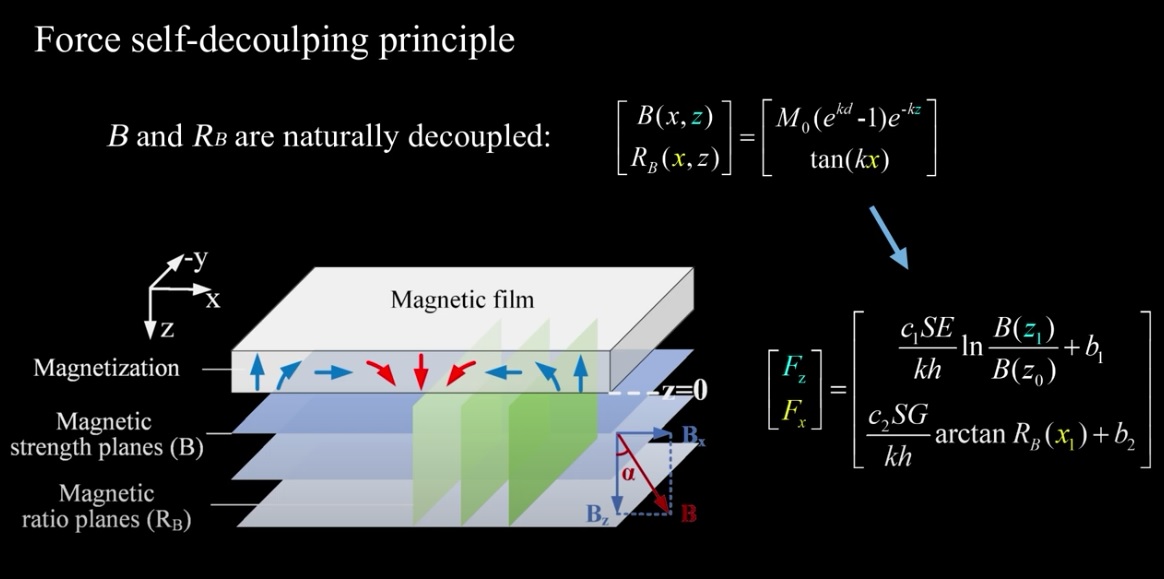
Принцип работы инновационного тактильного датчика базируется на регистрировании изменения характеристик магнитного поля при деформации мягкой плёнки. Более того, сенсор может автоматически различать внешние силы, воздействующие на плёнку, выделяя как силу нормальной реакции (действующую на тело со стороны опоры и направленную перпендикулярно к поверхности соприкосновения), так и силу сдвига. Такое разделение характеристик важно из-за того, что каждый компонент внешних сил по-своему влияет на объект. Необходимо учитывать оба значения, чтобы прави льно интерпретировать их воздействие и реализовать отклик роботизированной руки, которая удерживает объект.
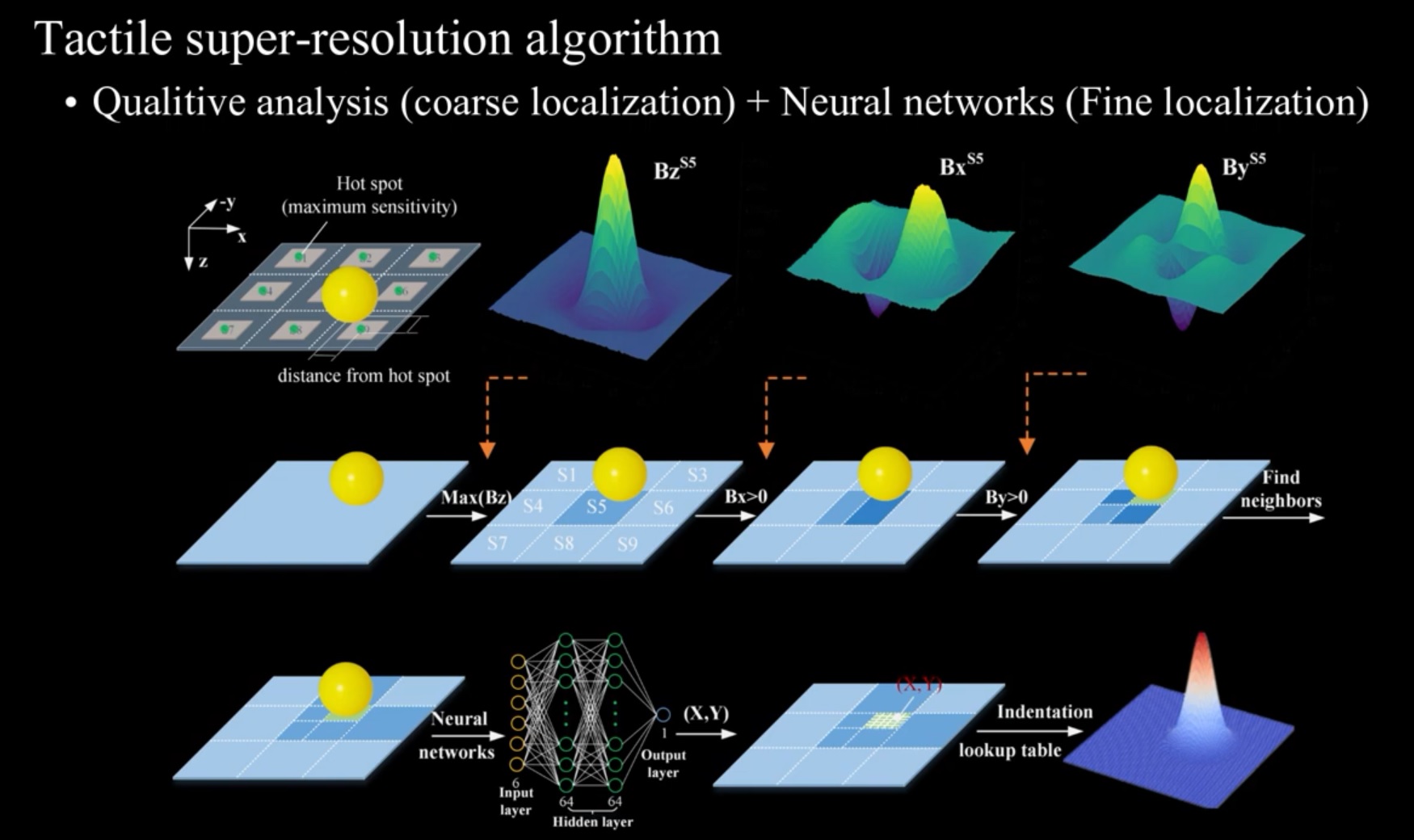
Ко всему прочему при помощи технологий глубинного обучения исследователи разработали алгоритм, благодаря которому сенсор получил осязание «высокого разрешения». Таким образом датчик фиксирует не только сдвиговую силу или силу нормальной реакции, но и точное расположение и направление стимула. Сгенерированный учёными алгоритм позволяет извлекать максимальное физическое разрешение с тактильного сенсора с наименьшей площадью, тем самым уменьшая количество проводов и время передачи сигналов. По словам доктора Шэня, тактильный датчик, разработанный его командой, впервые в истории способен идентифицировать сразу несколько значений воздействия.
Для демонстрации возможностей магнитного тактильного сенсора учёные установили его на роботизированную руку. Затем оборудованная инновационным датчиком робо-рука выполнила несколько непростых задач. К примеру, роботизированной руке удалось достаточно крепко и аккуратно удерживать сырое яйцо, чтобы оно не разбилось, пока человек пытался вытащить его из железной хватки робота. Затем исследователи продемонстрировали, как сенсор позволил робо-руке адаптировать силу фиксации, чтобы удержать пластиковую бутылку, в которую наливали жидкость, постепенно увеличивая её массу. Магнитный тактильный датчик также может служить для осуществления мелкомасштабных манипуляций путём дистанционного управления. К примеру, с его помощью разработчики за считанные секунды сумели удалённо заправить нить в иголку.
По мнению разработчиков, инновационный магнитный тактильный сенсор имеет отличные перспективы в робототехнике. Его применение привнесёт реальный прогресс в различные области данной отрасли, начиная от промышленности и заканчивая медициной. К тому же исследователи сообщили, что подобные датчики требуют гораздо меньше времени для производства и калибровки, чем большинство традиционных тактильных сенсоров.