Как правило, роботизированные руки бывают либо очень сильными, но совершенно неделикатными, либо нежными, но неспособными работать с крупными и тяжёлыми объектами. Стэндфордские инженеры разработали уникальный рабочий инструмент для манипулятора – руку farmHand, которая совмещает в себе силу и гибкость человеческих пальцев, а также цепкость лапок гекконов.
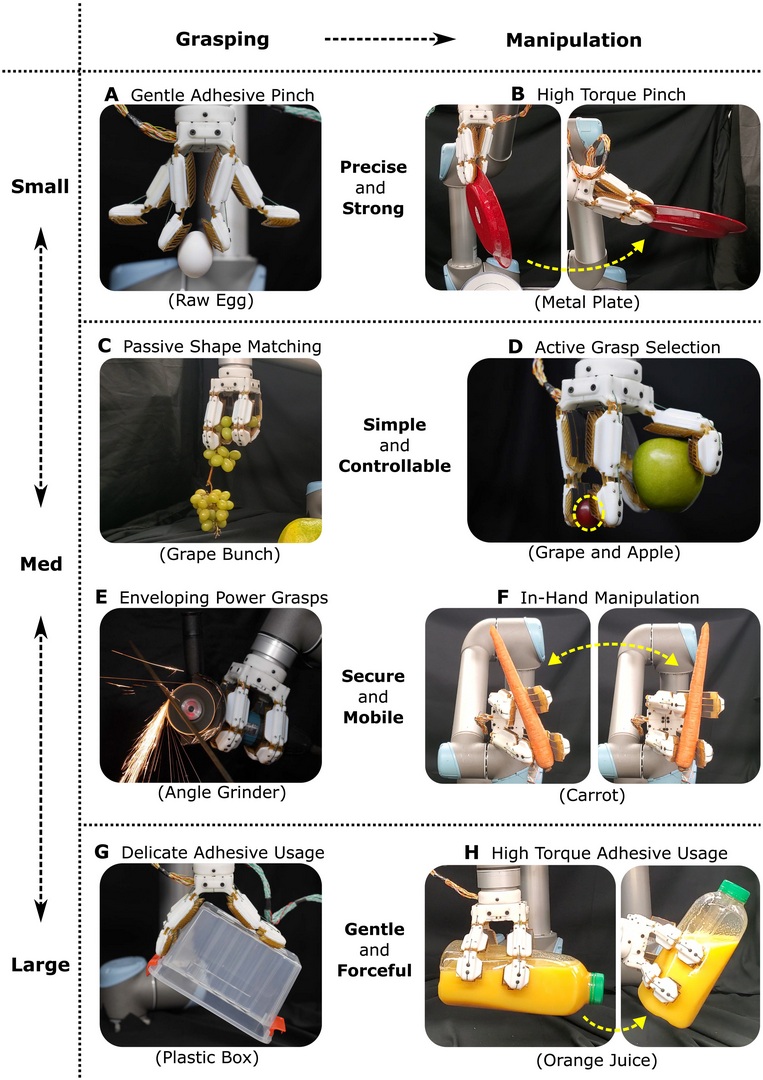
Команда стэндфордских инженеров в лице Уилсона Руотоло, Дэйна Брауэра и Марка Каткоски разработала роботизированную руку farmHand, рассчитанную на взаимодействие с широчайшим спектром объектов. Инструмент получил четыре пальца, которые смыкаются вокруг предметов путём натяжения внутренних искусственных сухожилий. Движения большинства манипуляторов ограничены С-образным хватом, однако сухожилия farmHand позволяют сложить пальцы в щепоть, увеличивая контакт хвата. На всех сегментах пальцев располагаются эластомерные подушечки, смоделированные по образу и подобию конечностей геккона. Гекконы способны передвигаться по гладким вертикальным поверхностям и потолкам за счёт миллионов микроскопических щетинок, которые усеивают их лапки. Эти крошечные структуры взаимодействуют с поверхностями, по которым передвигается ящерица, образуя с ними временную связь на молекулярном уровне. Данный феномен обусловлен силами Ван-дер-Ваальса.
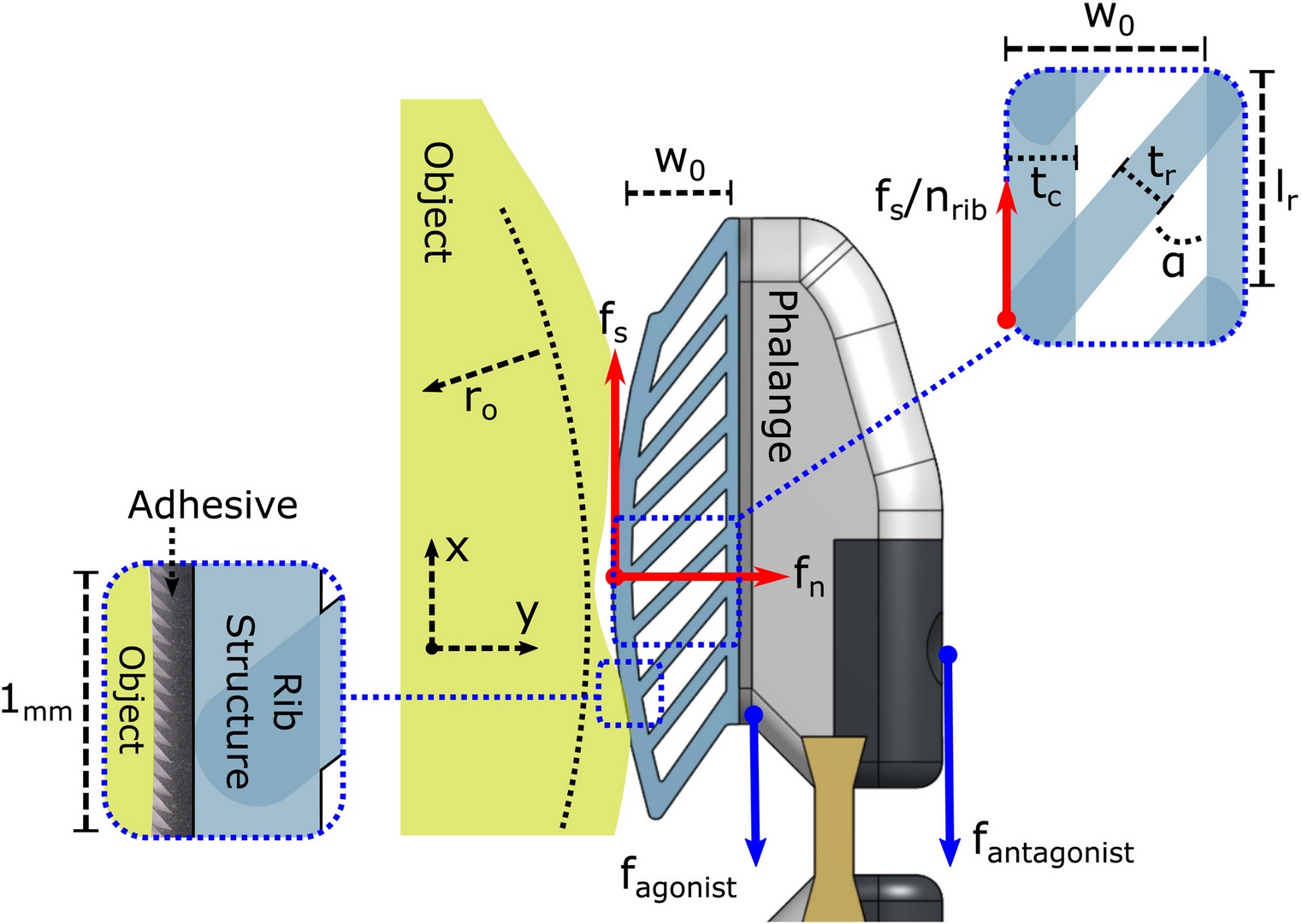
На подушечках пальцев роборуки farmHand аналогичную роль выполняют микроскопические клинья, которые образую адгезивную поверхность. С их помощью манипулятор будто приклеивается к объектам на молекулярном уровне, не оставляя разводов клейкого вещества после разрыва связи. Сложность реализации адгезива по образцу гекконовых щетинок заключалась в том, что для «активации» Вандерваальсовых сил конечность должна контактировать с поверхностью особым образом, относительно легко достижимым на гладкой ровной поверхности. Для работы «липучки» с более сложными объектами инженерам пришлось поэкспериментировать. Решением проблемы стала сминающаяся ребристая конструкция, которая играет роль мягкой пружины, аккуратно прижимающей пальцы робота к поверхности объекта. Кроме того, данный элемент помогает распределять силу хвата по контактной поверхности при работе с предметами любой формы. При этом четырёхпалая роборука наносит меньше повреждений мягким объектам, не позволяя им выскользнуть из хватки.
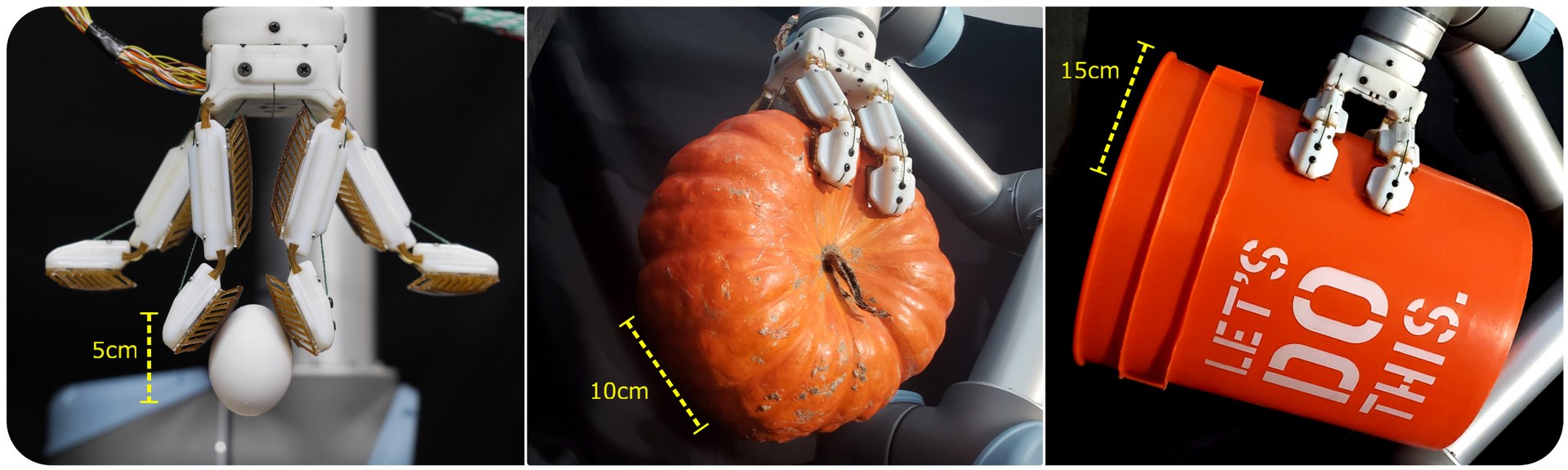
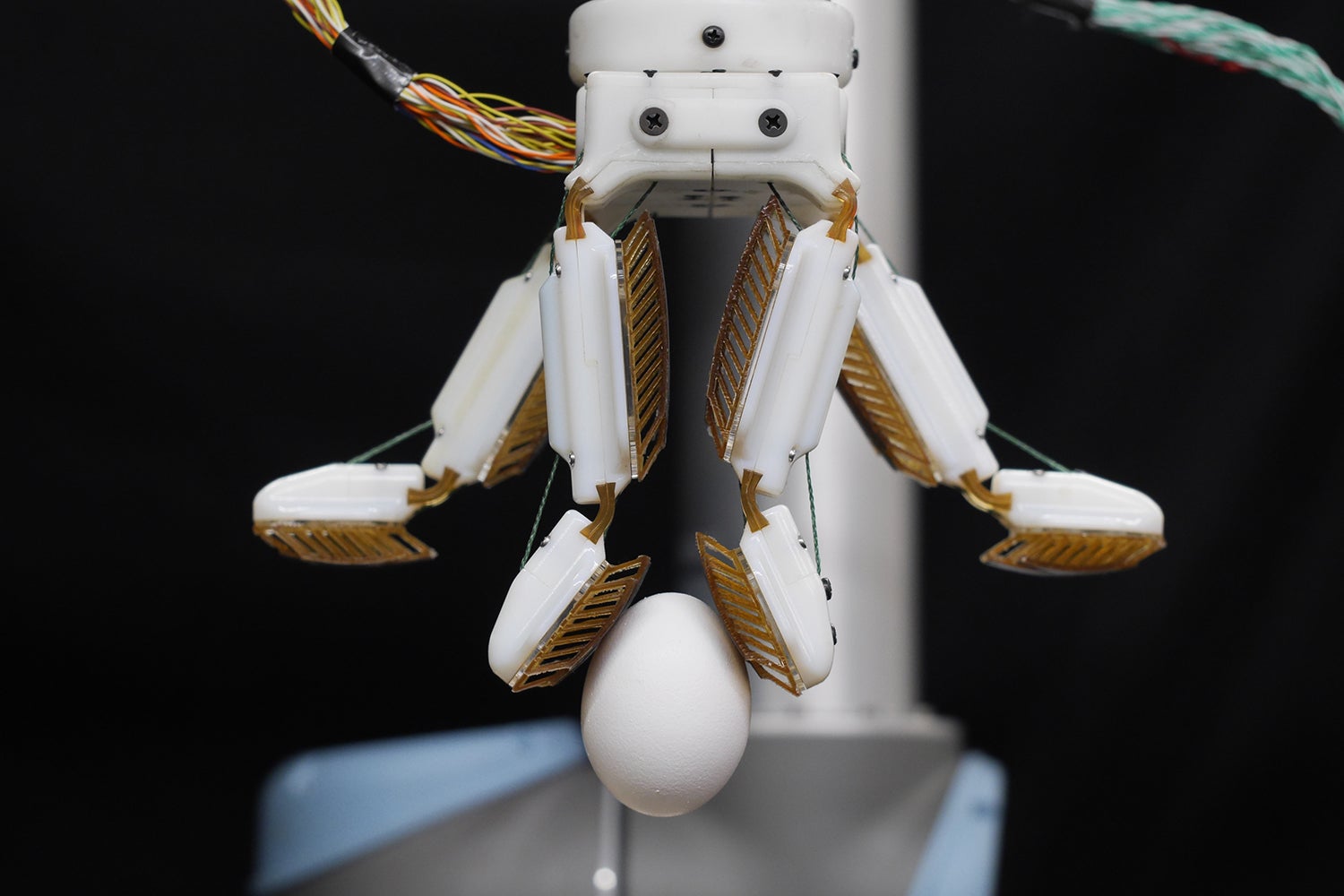
В ходе лабораторных испытаний инженеры отметили, что farmHand аккуратно взаимодействует с деликатными объектами вроде сырых яиц, негибридных помидоров и виноградин. В то же время роборука без труда обходится с более массивными и тяжёлыми предметами вроде баскетбольного мяча или угловой шлифовальной машины. Инженеры планируют оборудовать манипулятор датчиками обратной связи активного усилия. По мере совершенствования устройства исследователи также надеются найти ему коммерческое применение.