Уявіть собі робота, який може трансформуватися з конфігурації літаючого дрона в колісний апарат. Такі пристрої безперечно були б корисними в багатьох галузях. Саме це вміє робити ATMO, створений командою інженерів з Каліфорнійського технологічного інституту.
 Назва ATMO є акронімом, що розшифровується як Aerially Transforming Morphobot. Цей пристрій базується на технології з одного з попередніх проєктів тієї ж групи дослідників – M4 (Multi-Modal Mobility Morphobot). M4 літав як звичайний квадрокоптер, розправляючи свої пропелери горизонтально. Після приземлення на лижеподібне шасі пропелери складаються, а їхні захисні кожухи перетворюються на гумові колеса. Це цікавий дизайн, який має один суттєвий недолік. Якщо в зоні приземлення є каміння, висока трава або інші виступаючі перешкоди, пропелери не зможуть скластися під правильним кутом. Рішення цієї проблеми полягає в тому, щоб робот приземлявся вже з майже повністю опущеними пропелерами/колесами. Саме це вміння відрізняє ATMO від його попередника.
Назва ATMO є акронімом, що розшифровується як Aerially Transforming Morphobot. Цей пристрій базується на технології з одного з попередніх проєктів тієї ж групи дослідників – M4 (Multi-Modal Mobility Morphobot). M4 літав як звичайний квадрокоптер, розправляючи свої пропелери горизонтально. Після приземлення на лижеподібне шасі пропелери складаються, а їхні захисні кожухи перетворюються на гумові колеса. Це цікавий дизайн, який має один суттєвий недолік. Якщо в зоні приземлення є каміння, висока трава або інші виступаючі перешкоди, пропелери не зможуть скластися під правильним кутом. Рішення цієї проблеми полягає в тому, щоб робот приземлявся вже з майже повністю опущеними пропелерами/колесами. Саме це вміння відрізняє ATMO від його попередника.

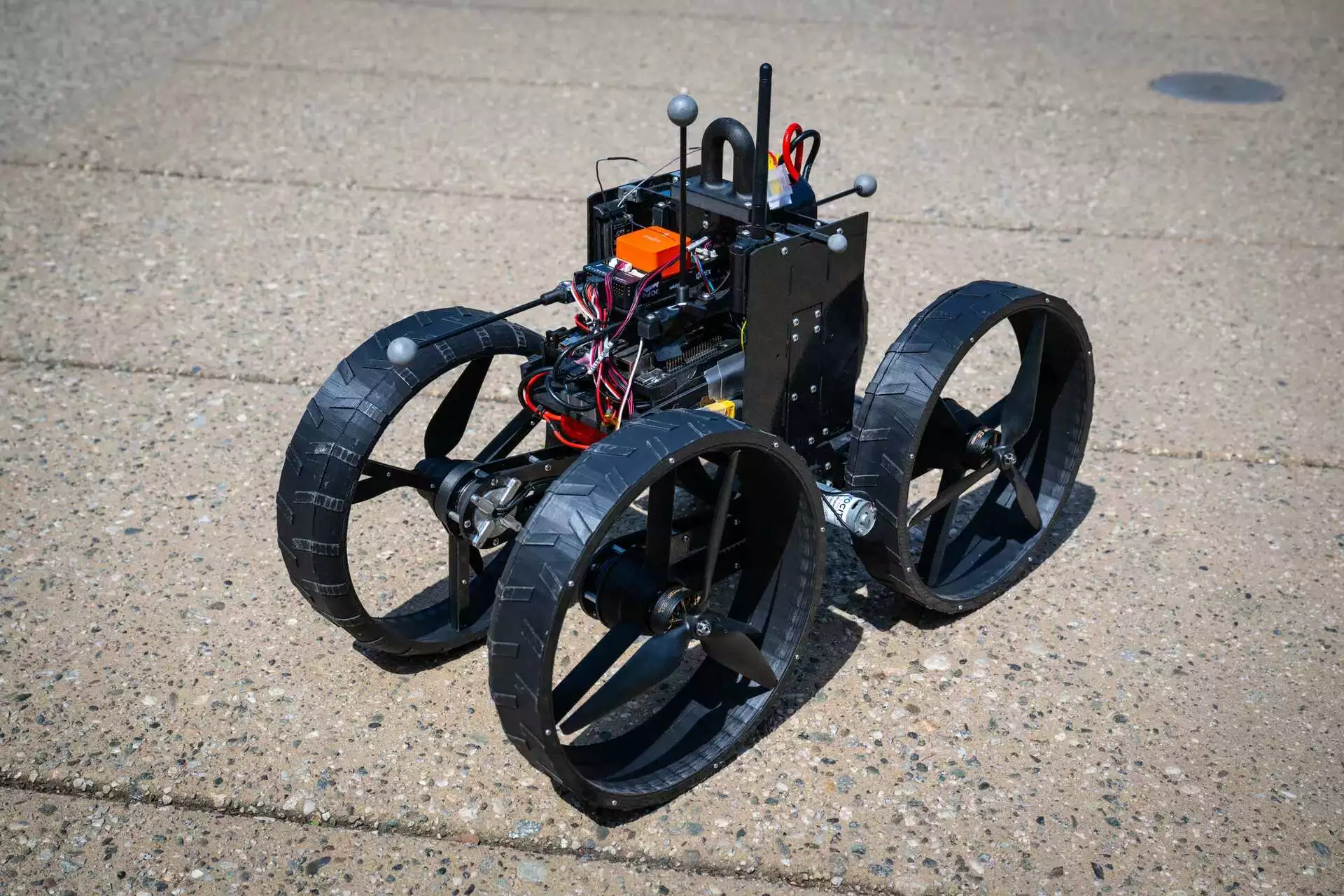 Як і в класичного квадрокоптера, кожен його пропелер має власний мотор для підтримки робота в польоті. Проте їхнє складання регулюється іншим центральним мотором, який приводить в дію відповідний вузол. Його конструкція не така проста, як може здаватися з першого погляду. Зі зміною кута пропелерів змінюється і характеристики польоту ATMO, адже гвинти інакше спрямовують повітряний потік, наближаючись до вертикального положення. Тому інженерам довелося розробити спеціальний алгоритм, який компенсує ці зміни, регулюючи тягу кожного моторчика. Завдяки цьому морфобот виконує стабільне динамічне приземлення на колеса і є одразу готовим до руху на поверхні. На Землі колеса обертаються ремінними приводами, розташованими з обох боків. Керування роботом здійснюється за допомогою диференціала, який змінює швидкість обертання приводів незалежно один від одного.
Як і в класичного квадрокоптера, кожен його пропелер має власний мотор для підтримки робота в польоті. Проте їхнє складання регулюється іншим центральним мотором, який приводить в дію відповідний вузол. Його конструкція не така проста, як може здаватися з першого погляду. Зі зміною кута пропелерів змінюється і характеристики польоту ATMO, адже гвинти інакше спрямовують повітряний потік, наближаючись до вертикального положення. Тому інженерам довелося розробити спеціальний алгоритм, який компенсує ці зміни, регулюючи тягу кожного моторчика. Завдяки цьому морфобот виконує стабільне динамічне приземлення на колеса і є одразу готовим до руху на поверхні. На Землі колеса обертаються ремінними приводами, розташованими з обох боків. Керування роботом здійснюється за допомогою диференціала, який змінює швидкість обертання приводів незалежно один від одного.
 Джерело фото: Ioannis Mandralis/Communications Engineering
Джерело фото: Ioannis Mandralis/Communications Engineering