Кажется, человечеству никогда не будет достаточно роботов, которые так или иначе напоминают животных. Биомиметика в сфере робототехники не знает границ: люди стремятся к тому, чтобы делать роботов стереотипно милыми и похожими на диких животных или домашних питомцев. Стоит отметить, что такой подход не лишён достоинств, поскольку имитация зверей – дельфинов, осьминогов, рыб-прилипал, собак или насекомых – позволила человечеству добиться создания более совершенных механизмов. Для разработки робота-амфибии Amphibious Robotic Turtle или ART учёные из Йельского университета обратились к черепахам, строение конечностей которых обусловлено их образом жизни.
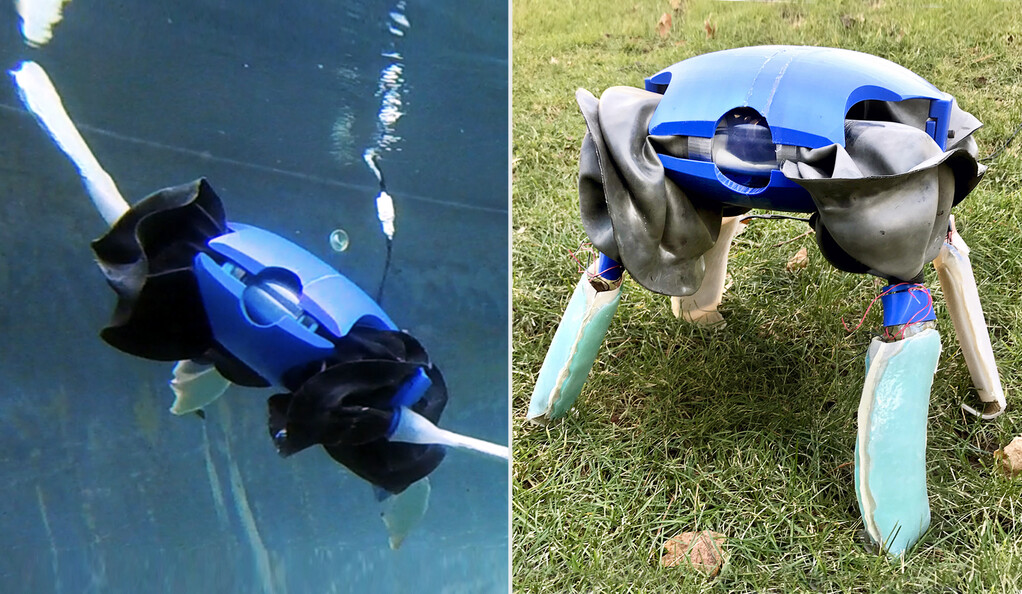
ART – это полуводный робот, который представляет собой механизм, напоминающий нечто среднее между крабом и черепахой. Его отличительной особенностью являются конечности, способные менять свою степень жёсткости и форму. По словам профессора механического инжиниринга Ребекки Крамер-Боттиглио, морские и наземные черепахи имеют схожую организацию скелета туловища, панцирь и четыре конечности, однако строение последних напрямую зависит от образа жизни животного.

У морских черепах лапы полностью преобразованы в ласты, у пресноводных между пальцами конечностей имеются плавательные перепонки, а у сухопутных отсутствуют какие-либо адаптации для передвижения в воде, однако их ноги имеют более утолщённую столбообразную форму для удержания веса тела животного на суше. По мере эволюции черепах их конечности видоизменялись, чтобы соответствовать жизненному укладу пресмыкающегося. Этот феномен адаптации живого организма к новым условиям называется морфогенезом.
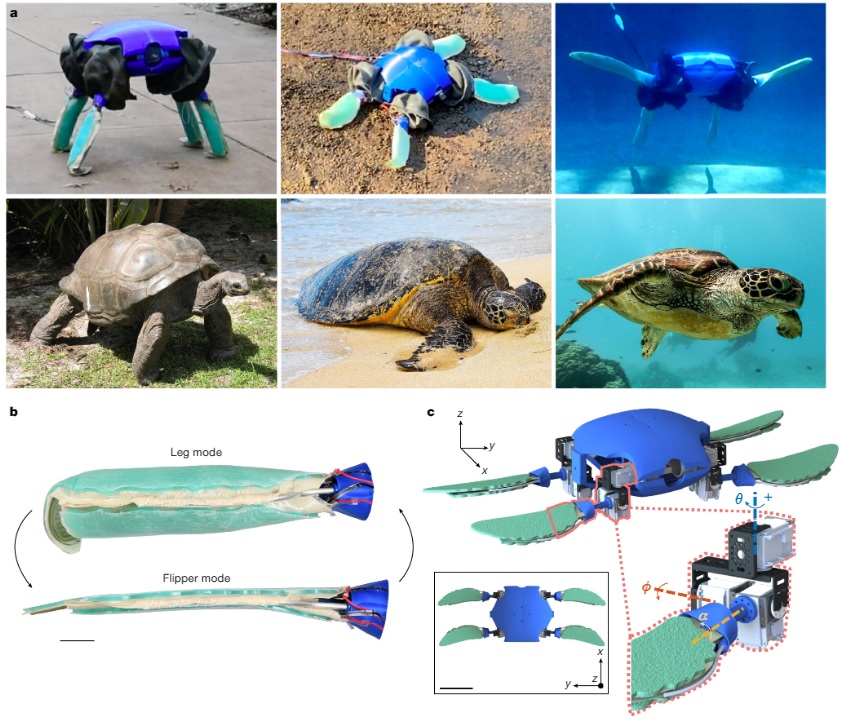
В теле ART исследователи из Йельского университета реализовали ускоренный адаптивный морфогенез, который позволяет механизму приспосабливаться к окружению, эволюционируя по команде. Его конечности представляют собой сложный комплекс суставов с тремя моторчиками и системой термопластичных материалов. При необходимости они могут принимать столбообразную форму, как у сухопутных черепах, для передвижения по суше, а затем превращаться в ласты для плавания в водоёме. Хотя ART не отличается высокой скоростью передвижения – это всё же робот-черепаха, он довольно неплохо справляется с преодолением различных типов поверхностей. В частности, исследование показало, что земноводное четверолапое устройство является более эффективным в задачах на передвижение по различным субстратам, чем, например, двуногий робот, разработанный в МТИ. При этом робот-земноводное не уступает по проходимости четвероногим роботам с более традиционной конструкцией суставов и конечностей.

Представители Йельского университета считают, что «вездеходность» ART открывает новые перспективы применения робототехники для мониторинга экосистем вблизи береговых линий, дайверских локаций или океанических ферм, а также для исследования волн и течений.