Самые знаменитые хищные растения вида Dionaea muscipula давно привлекают внимание исследователей. Ловушка венериной мухоловки способна к быстрым и точным движениям, потому её механизм захлопывания всегда был предметом интереса для учёных – а в особенности для робототехников. Несколько лет назад исследователи воспроизвели искусственный аналог ловушки растения, однако теперь сингапурские инженеры сумели превратить в киборга саму венерину мухоловку.

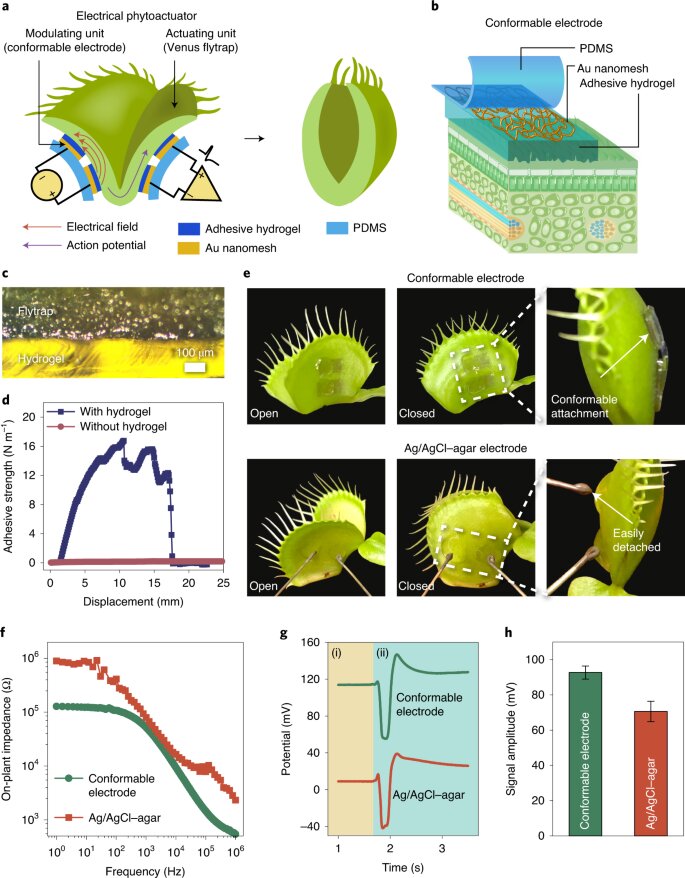
В повседневной жизни Dionaea muscipula захватывает ничего не подозревающую жертву, когда та оказывает механическое воздействие на тончайшие чувствительные волоски на одной из «челюстей» растения. Раздражение волосков приводит к генерации потенциала действия, который стремительно распространяется по всей ловушке и приводит к её захлопыванию. По сей день учёные не до конца разгадали механизм срабатывания ловушки на биохимическом уровне: предположительно, в этом процессе принимают участие растительные гормоны, которые запускают изменение формы «челюстей».

Впрочем, исследователи из Наньянского технологического университета решили обойти естественные механизмы хищного растения и заставили венерину мухоловку срабатывать по их велению. Для этого учёные присоединили к ловчим листьям хищника электроды и управляли их захлопыванием при помощи небольшого электрического импульса. Оказалось, что для стимуляции ловушки достаточно всего 10−5 Вт. По словам материаловеда Вэньлона Ли и его коллег Наньянского технологического университета в Сингапуре, даже когда ловчий аппарат растения срезали со стебля, он сохранял способность закрываться по команде ещё на протяжении суток.
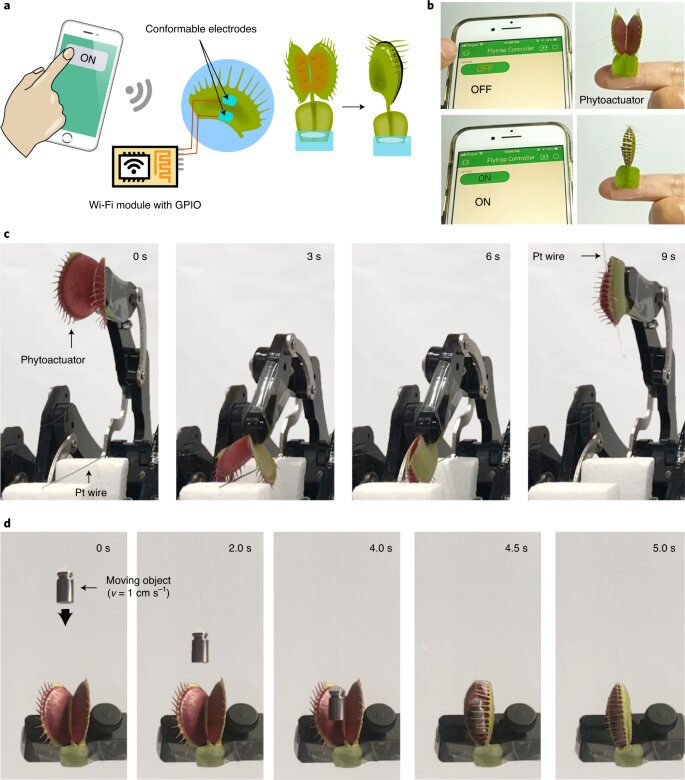
Инженеры считают, что венерину мухоловку можно использовать в робототехнике практически в неизменном виде. В сравнении с традиционным робот-гриппером, её ловчий аппарат осуществляет гораздо более мягкий и аккуратный захват. Таким образом, в сочетании с роботом-манипулятором ловушка венериной мухоловки может работать с самыми маленькими и хрупкими предметами, которые были бы неизбежно повреждены неуклюжими, грубыми движениями механических пальцев обычного робота. Команда Вэньлона Ли разработала специальное приложения для смартфона: с его помощью одним нажатием кнопки можно активировать венерину мухоловку, прикреплённую к роботизированной руке. При этом инженерам удалось сократить время отклика до 1,3 секунды. В ходе экспериментов хищный биоробот сумел захватить и удержать проволоку диаметром пол миллиметра. Кроме того, при более устойчивой фиксации ловушки она словила медленно движущуюся гирьку массой 1 грамм.
Источник: An on-demand plant-based actuator created using conformable electrodes