Мы живём в удивительную пору, имея возможность наблюдать развитие робототехники в режиме реального времени. Едва ли не каждую неделю в сети появляются видео с четвероногими роботами, которые научились танцевать, вести и пасовать мяч, выполнять забавные, а порой и жуткие трюки. Впрочем, в последнее время становится трудно сравнивать прогресс и результаты развития робопсов, поскольку в данной отрасли до сих пор нет каких-либо единых стандартов. Исследователи из Google решили исправить это недоразумение, разработав Barkour – полосу препятствия, которая позволяет оценивать параметры четвероногих роботов по аналогии с аджилити трассами для собак.

В блоге компании необходимость создания подобной трассы объяснили отсутствием общепринятых тестов производительности для четвероногих роботов, позволяющих наглядно охарактеризовать скорость, проворство и ловкость машин при выполнении тех или иных задач. Робототехники упорно работают над усовершенствованием подвижности и прочих способностей роботов, но даже спустя годы в индустрии нет единого теста для оценки реального уровня развития техники. Во многих отраслях, включая сферы вычислительных технологий, машинного обучения и пр. бенчмарки служат одним из ведущих двигателей прогресса, например, ImageNet для технологий компьютерного зрения или OpenAI Gym для обучения систем с подкреплением. Barkour, название которого расшифровывается как Benchmarking Animal-level Agility with Quadruped Robots, может заполнить пробел в отрасли робототехники, стимулируя более интенсивное исследование и развитие индустрии.
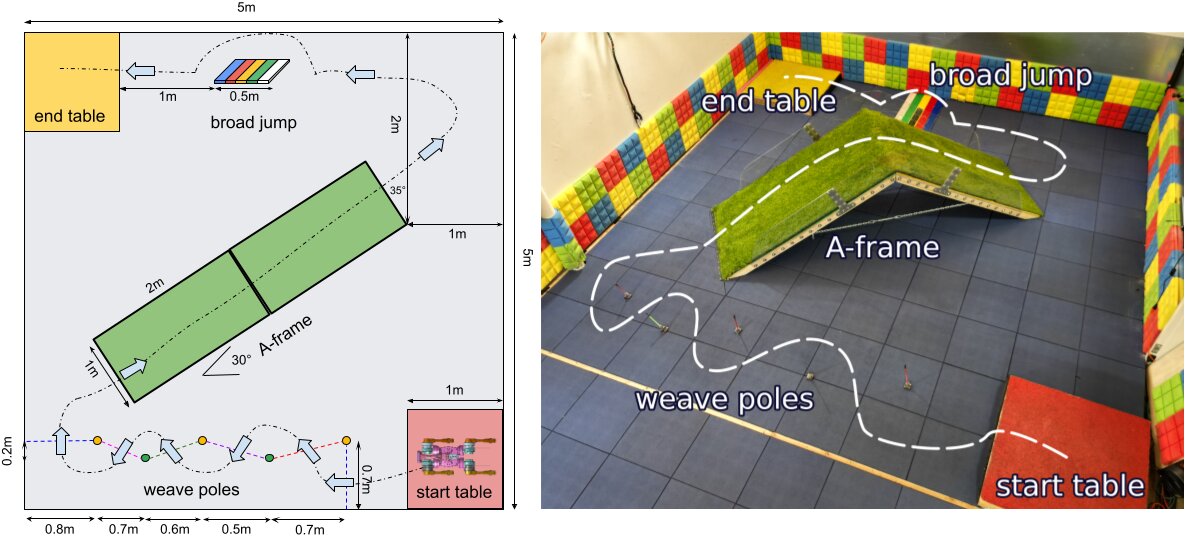

По своей сути Barkour представляет собой практически полную имитацию классической аджилити трассы для собак. Данный бенчмарк отличается относительно компактными размерами – примерно 5 на 5 метров, чтобы всю полосу препятствий можно было комфортно разместить в среднестатистической робототехнической лаборатории. Базовая версия Barkour состоит из 5 препятствий: стартовой площадки-ступеньки, участка слалом с вертикальными стойками для отработки «змейки», А-образной горки, платформы для прыжка в длину и финальной платформы для отработки «ступеньки». Поскольку данная трасса предназначена для оценки роботов, отчасти имитирующих собак, для её тестирования исследователи Google использовали реальных собак – питомцев сотрудников компании. По итогам теста маленькие собаки преодолевали полосу препятствий примерно за 10 секунд, в то время как роботам для отработки тех же элементов необходимо примерно вдвое больше времени.
Для оценки роботов по шкале от 0 до 1 учёные использовали целевое время преодоления препятствий, установленное для собак маленьких пород в соревнованиях для новичков (1,7 м/с). Чтобы завершить испытание, робот должен преодолеть все 5 препятствий, однако, как и в собачьих соревнованиях аджилити, конкурсантов «штрафуют» за падения, неправильное прохождение трассы (например, пропуск стоек в слаломе), слишком медленное передвижение и пр. По мнению учёных, создание подобных бенчмарков является важным шагом для возможности численной оценки прогресса развития четвероногих роботов на пути к достижению уровня подвижности и проворности, свойственного реальным животным.