Биоинженеры из Бостонского детского госпиталя представили первого робота, способного самостоятельно ориентироваться в теле пациента. В ходе экспериментов на животных команда учёных запрограммировала робота на обнаружение дефектного сердечного клапана. Роботизированный катетер смог отыскать путь к цели, пробираясь внутри наполненных кровью сосудов – без вмешательства хирурга. Результаты исследования бостонских специалистов были опубликованы в журнале Science Robotics.
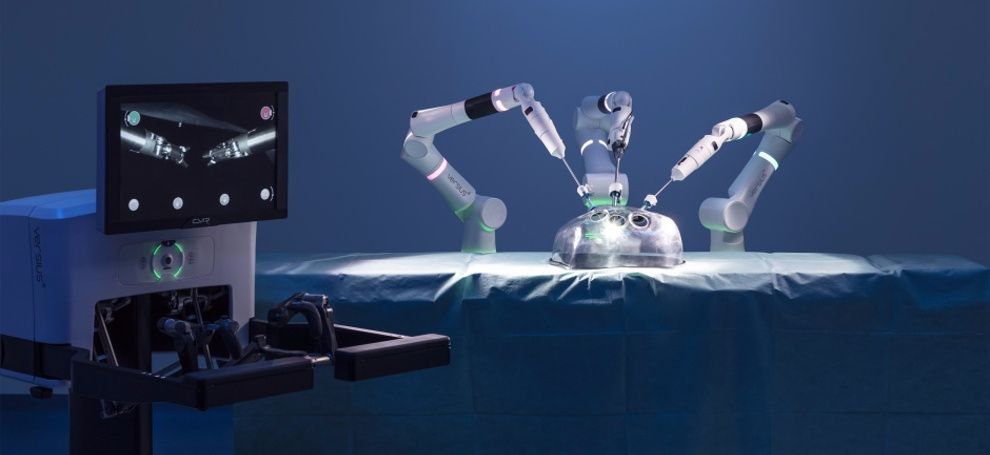
Применение управляемых роботов в хирургии успешно практикуется уже более десяти лет. Как правило, подобное оборудование состоит из двух блоков: робота манипулятора и пульта управления, с помощью которого врачи управляют «руками» робота. Главный научный сотрудник проекта и глава отделения детской кардиологии доктор Пьер Дюпон заявляет, что их изобретение можно считать эквивалентом современного беспилотного автомобиля, который с лёгкостью доберётся в любой уголок человеческого тела. Автономные роботы-хирурги станут правой рукой врачей во время сложных операций, тем самым позволяя хирургам сфокусироваться на более трудных манёврах.

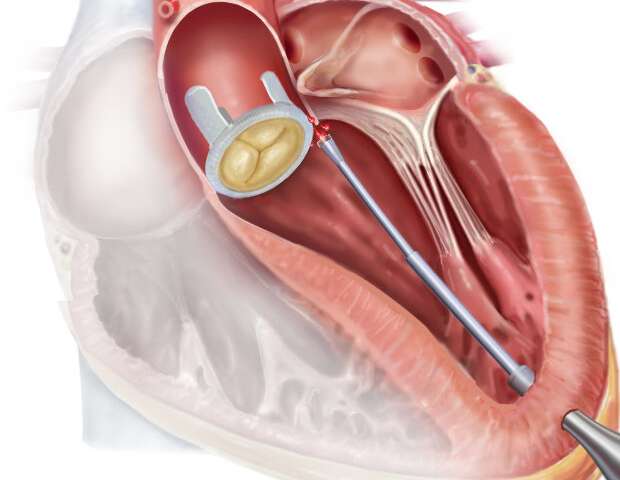
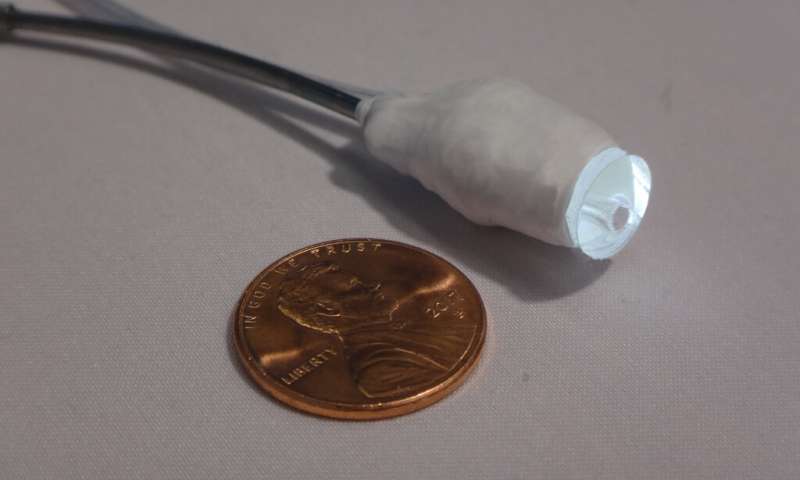
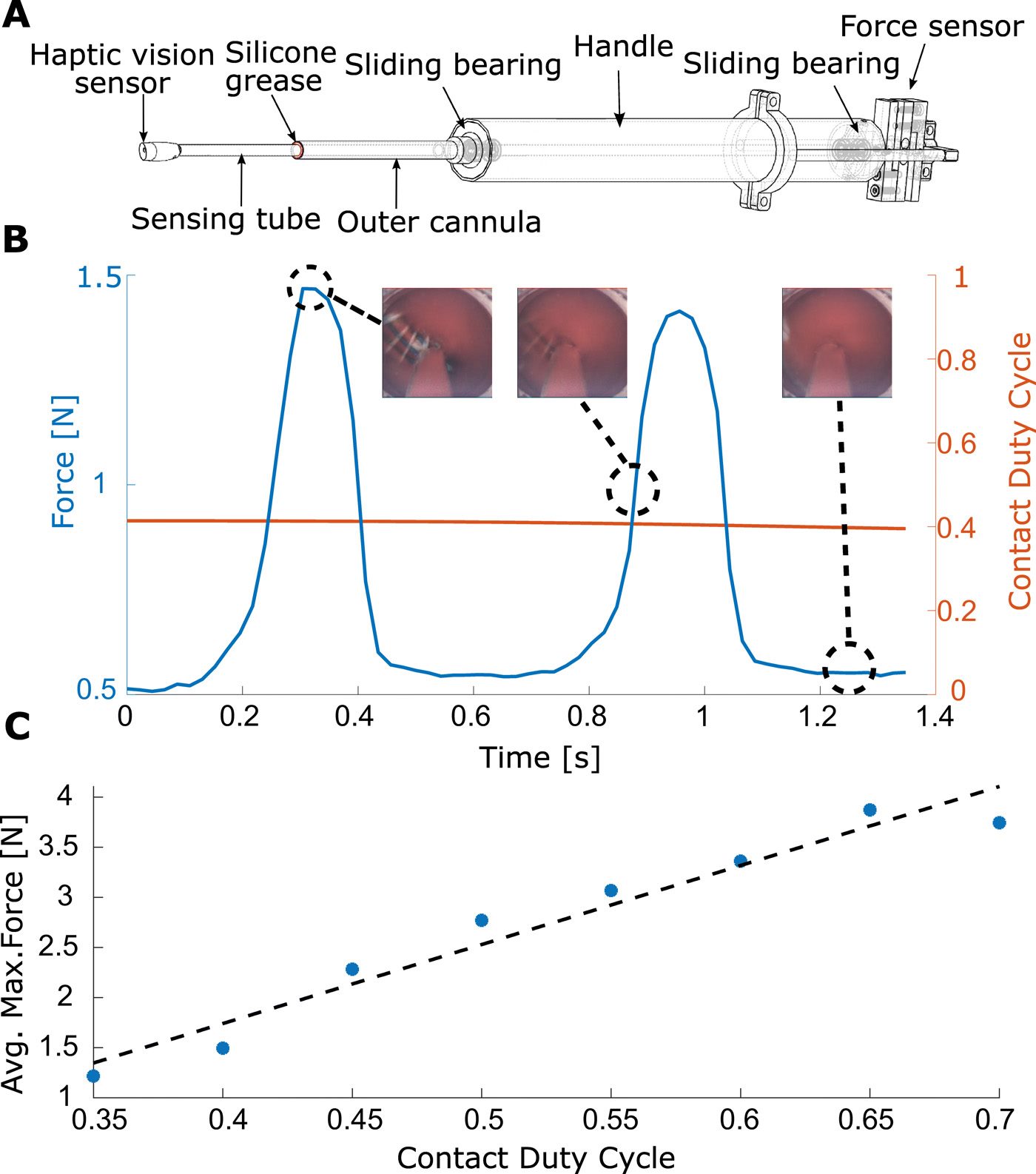
Для навигации внутри человеческого тела роботизированный катетер использует высокоскоростной оптический сенсор, разработанный в лаборатории Бостонского детского госпиталя. С помощью программы искусственного интеллекта робот сопоставляет получаемые с сенсора данные со встроенной анатомической картой и дооперационными снимками пациента. Для демонстрации возможностей робота команда исследователей выбрала технически сложную процедуру по ликвидации паравальвулярной фистулы – достаточно распространённого осложнения после протезирования аортального клапана, при котором разрушается соединение протеза с окружающей тканью. После того, как роботизированный катетер подошёл к фистуле, управление процессом перехватил опытный хирург. В последующих экспериментах роботу удавалось локализировать дефект примерно за то же время, что и хирургу с управляемым роботом.
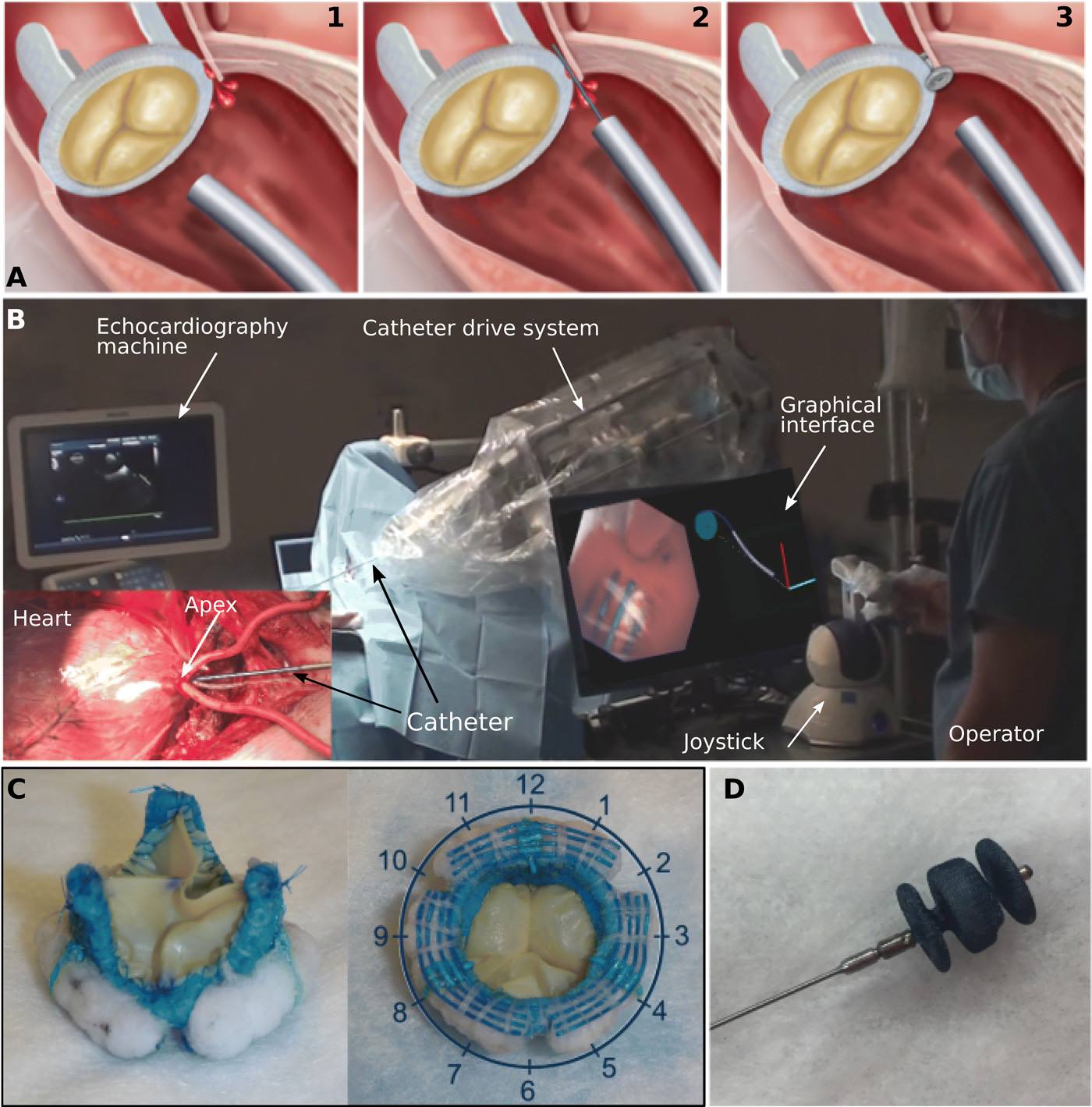
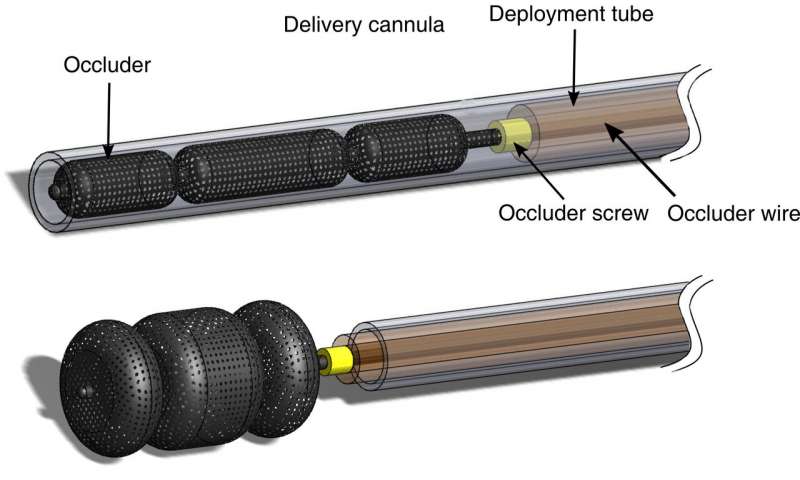
Вдохновение для разработки методики навигации, используемой роботом-хирургом, исследователи нашли в живой природе. Оптический сенсор, с помощью которого ориентируется робот, постоянно изучает окружающее пространство: насекомые и грызуны также используют свои усики, чтобы построить ментальную карту незнакомого места. Сенсор регулярно передаёт роботу сведения о том, чего он касается – крови, стенки сосуда или клапана, а также регулирует силу давления катетера на окружающие его ткани, чтобы не повредить их. Способность робота визуализировать и отличать между собой разные типы тканей позволит врачам и пациентам избавиться от необходимости использовать флюороскопию для ориентации катетера. Рентгеновское излучение является ионизирующим, потому длительная лучевая экспозиция во время операции несёт риск развития дополнительных радиационных осложнений.
Доктор Дюпон признался, что разработка данного робота и его испытания на животных не всегда проходили гладко. Пока хирурги могли расслабиться, ожидая, когда робот доберётся до проблемного клапана, команде инженеров приходилось несладко. Порой им приходилось в экстренном режиме перепрограммировать робота прямо в ходе операции. Однако именно эти моменты позволили довести технологию до совершенства. Хирурги-кардиологи, знакомые с результатами работы команды Дюпона, всячески поддерживают использование роботов как для рутинных процедур, так и для более сложных операций.

Управление по санитарному надзору за качеством пищевых продуктов и медикаментов США уже начало работу над формированием нормативно-правовой базы для внедрения медицинского оборудования, управляемого искусственным интеллектом. Как и в случае с беспилотными автомобилями, возможности автономных роботизированных катетеров будут постоянно расширяться, так как данные, получаемые от каждого действующего робота, послужат совершенствованию алгоритмов.