С начала XX века медики начали делать первые шаги в сторону развития кардинально нового метода хирургии – минимально инвазивной лапароскопии. Лапароскопия подразумевает проведение хирургических вмешательств через небольшие отверстия, в которые вводятся необходимые инструменты, камера и т. п. В большинстве случаев подобные операции гораздо безопаснее как для пациентов, так и для медиков. С 1980-х годов в операционных стали появляться необычные помощники – роботы-манипуляторы, которые позволяли увеличить количество используемых инструментов, а также повышали точность и гибкость движений хирургов. Впрочем, у всех существующих роботов-хирургов есть общий недостаток – довольно громоздкие габариты, из-за которых они нередко занимают целые комнаты. К тому же порой размер мешает роботам проводить самые тонкие манипуляции с хрупкими тканями и структурами человеческого организма. Решением этих проблем может стать новый миниатюрный робот-хирург, приспособленный к выполнению микроскопических операций – детище инженеров из Института биологической инженерии Висса и Sony Corporation.

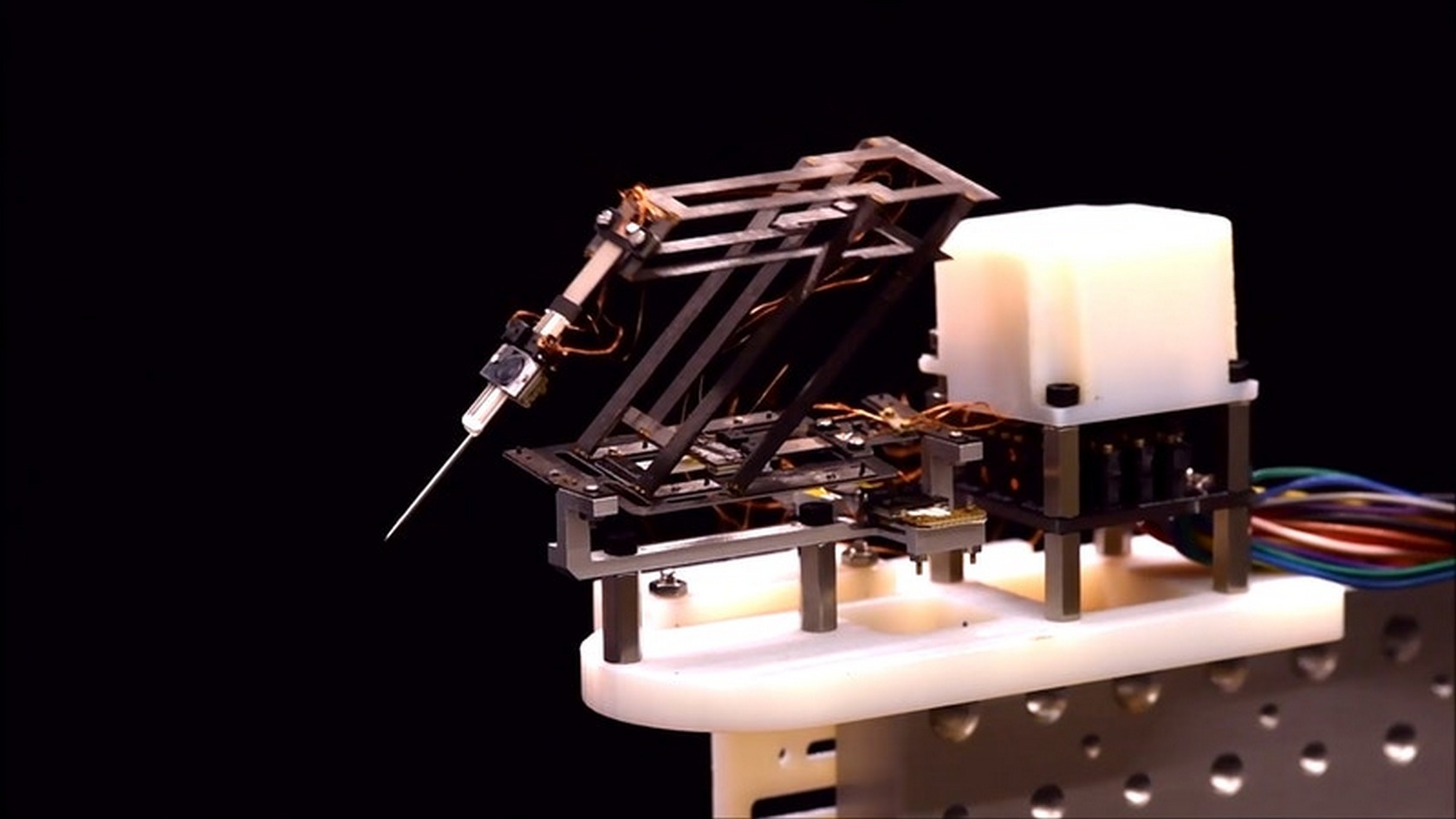
Благодаря сотрудничеству профессора Роберта Вуда из Института биологической инженерии Висса и инженера-робототехника Хироюки Сузуки из Sony Corporation роботизированная лапароскопия наконец достигнет уровня микроскопической хирургии. Робот-хирург, разработанный Вудом и Сузуки, весит меньше монетки пенни, а его размер не превышает диаметра теннисного мяча. Впрочем, малые габариты не помешали ему эффективно выполнить ряд хирургических задач, требующих высокой точности и гибкости движений.
Мини-робот для микро-задач
Высокотехнологичные лаборатории Института биологической инженерии Висса, являющегося одним из подразделений Гарвардского университета, стали стартовой площадкой для множества впечатляющих открытий в сфере робототехники, в том числе и в области разработки медицинских манипуляторов. Проект по созданию миниатюрного робота-хирурга стартовал в 2018 году в рамках сотрудничества между Гарвардским университетом и Sony Corporations. В его основе лежит гарвардская технология Pop-Up MEMS: вдохновлённая техникой оригами, она позволяет создавать сложные маломасштабные конструкции. Данная технология подразумевает послойное совмещение и скрепление материалов с последующим вырезанием по запрограммированному шаблону при помощи лазера. В итоге желаемая трёхмерная форма «вырастает» подобно объёмным картинкам в детских книгах-раскладушках. Применение технологии Pop-Up MEMS значительно упрощает серийное производство миниатюрных, но сложных конструкций, которые иначе приходилось бы долго и кропотливо собирать вручную.
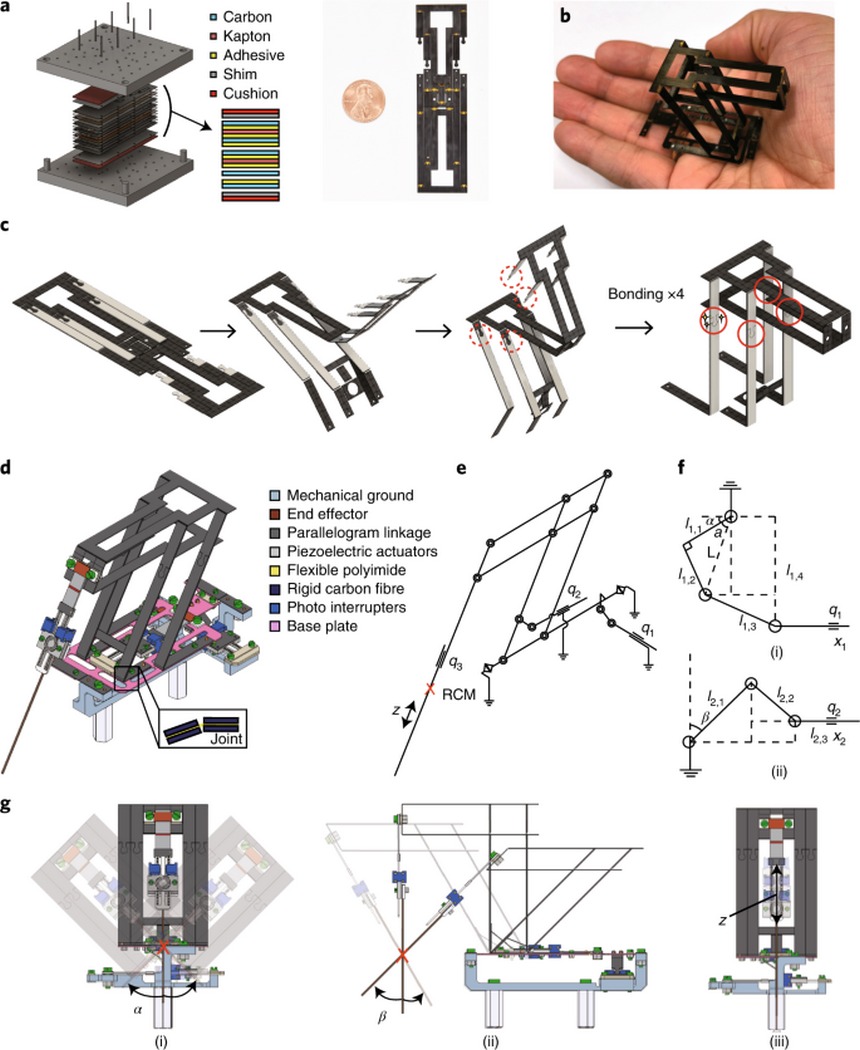
По задумке инженеров, робот-хирург имеет в своей основе мобильный параллелограмм, управляемый тремя линейными приводами. Первый привод, расположенный параллельно основной форме, позволяет поднимать и опускать её. Второй подключён перпендикулярно параллелограмму: этот привод отвечает за выполнение вращательных движений. Последний привод в месте крепления хирургического инструмента необходим для движений «вперёд-назад» по прямой. Результатом совместного труда команд Вуда и Сузуки стал робот, который превосходит по миниатюрности и лёгкости любые микрохирургические устройства, когда-либо разработанные в лабораториях Гарвардского университета. Даже его линейные приводы представляют собой миниатюрное чудо науки: в их основе лежит пьезоэлектрическая керамика, которая изменяет свою форму при воздействии на неё электрического поля. Это изменение формы толкает так называемый сдвиговый сегмент по направляющему сегменту, будто вагон по рельсам. Для контроля и корректировки нежелательных движений вроде дрожания рук инженеры интегрировали в привод оптические сенсоры, базирующиеся на светоизлучающих диодах.
Устойчивее рук хирурга
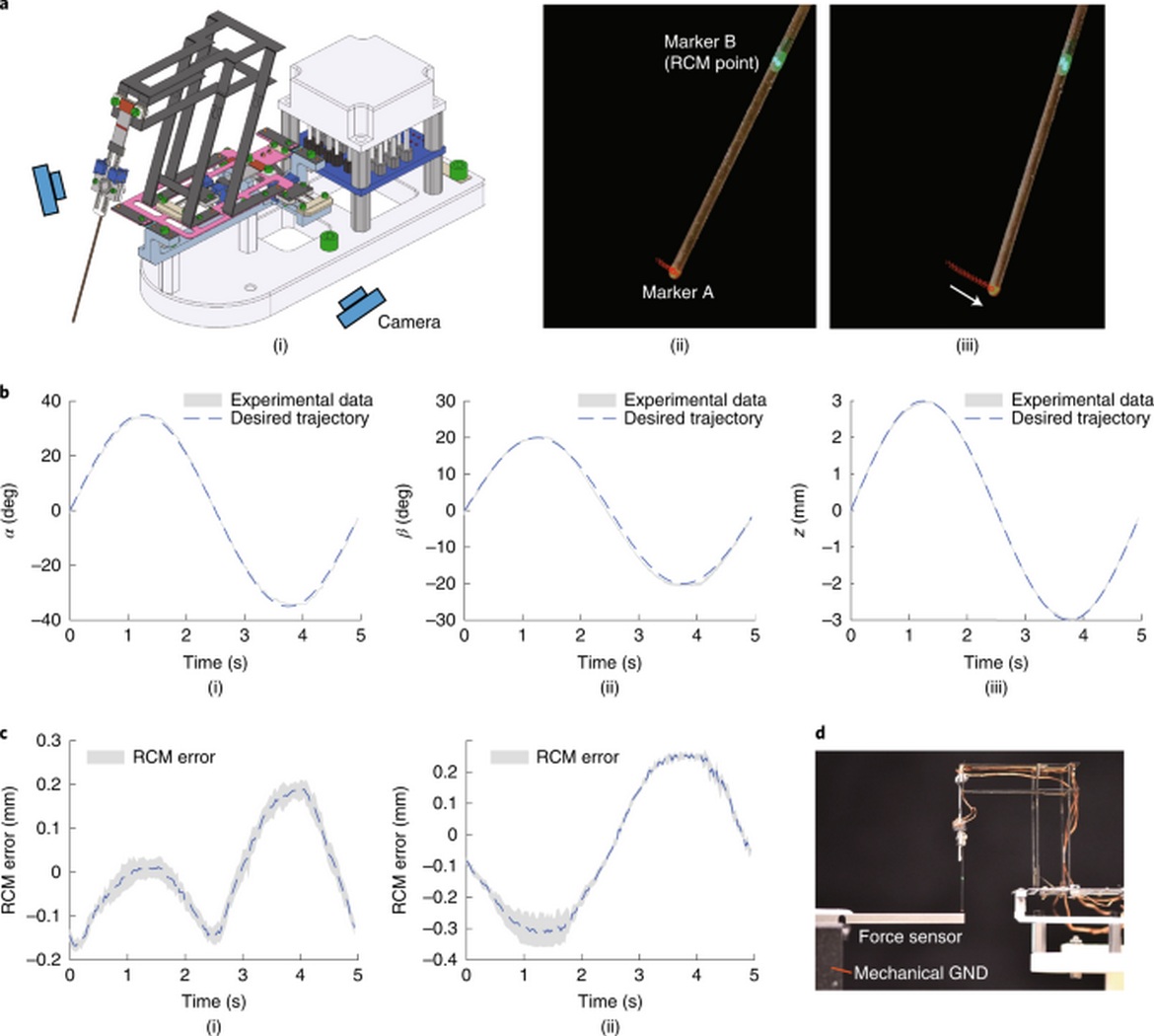
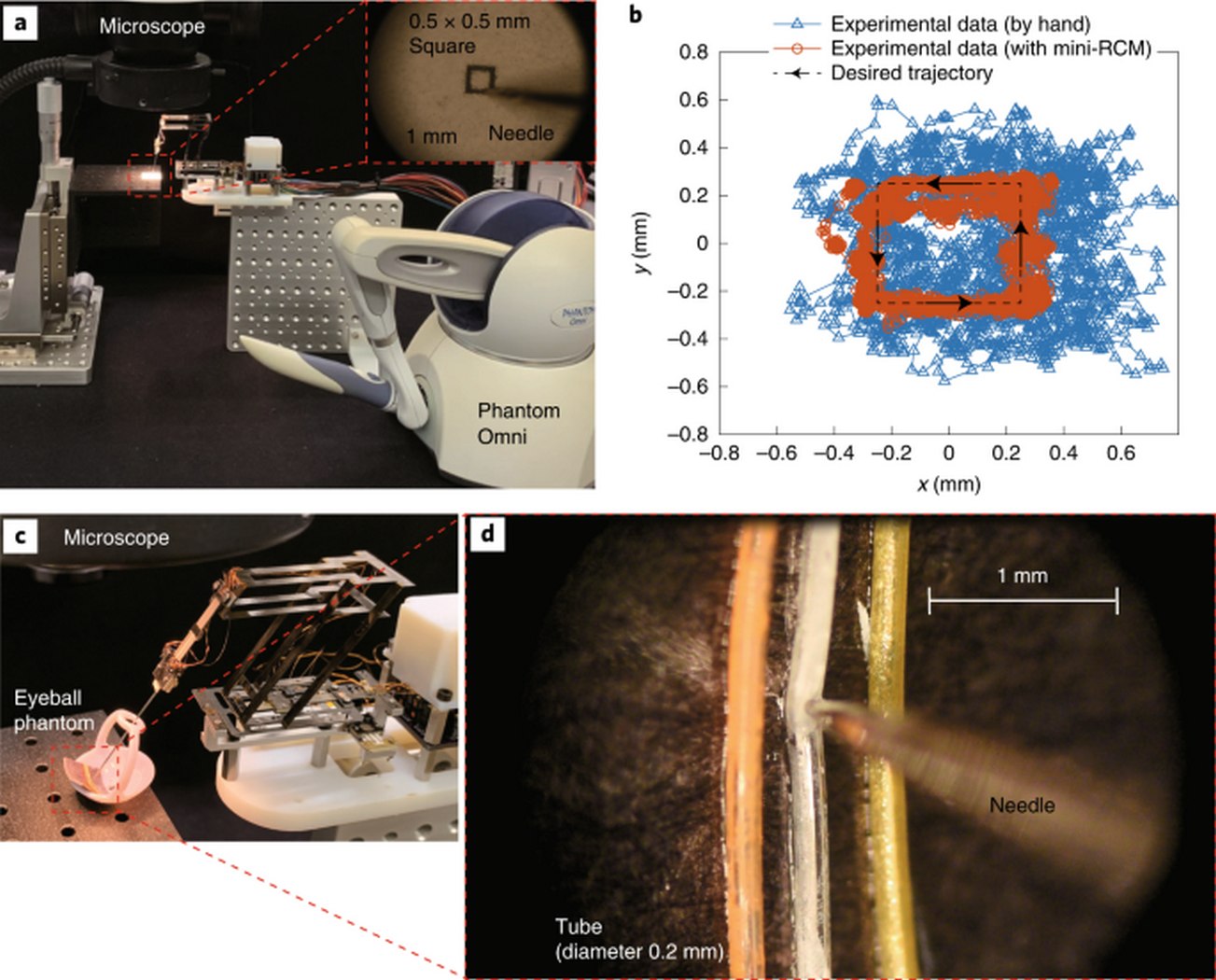
 Для имитации обстоятельств телеоперации, исследователи подключили приводы к устройству под названием Phantom Omni. Таким образом робот-хирург получил возможность удалённого управления при помощи девайса, напоминающего стилус. В ходе первого испытания члены команды Вуда и Сузуки должны были повторить очертания крошечного квадрата размером меньше острия шариковой ручки. Наблюдая фигуру в микроскоп, учёные пытались обвести квадрат от руки либо при помощи робота. Робот-хирург значительно повысил точность их движений, сократив количество колебаний и ошибочных штрихов на 68%.
Для имитации обстоятельств телеоперации, исследователи подключили приводы к устройству под названием Phantom Omni. Таким образом робот-хирург получил возможность удалённого управления при помощи девайса, напоминающего стилус. В ходе первого испытания члены команды Вуда и Сузуки должны были повторить очертания крошечного квадрата размером меньше острия шариковой ручки. Наблюдая фигуру в микроскоп, учёные пытались обвести квадрат от руки либо при помощи робота. Робот-хирург значительно повысил точность их движений, сократив количество колебаний и ошибочных штрихов на 68%.
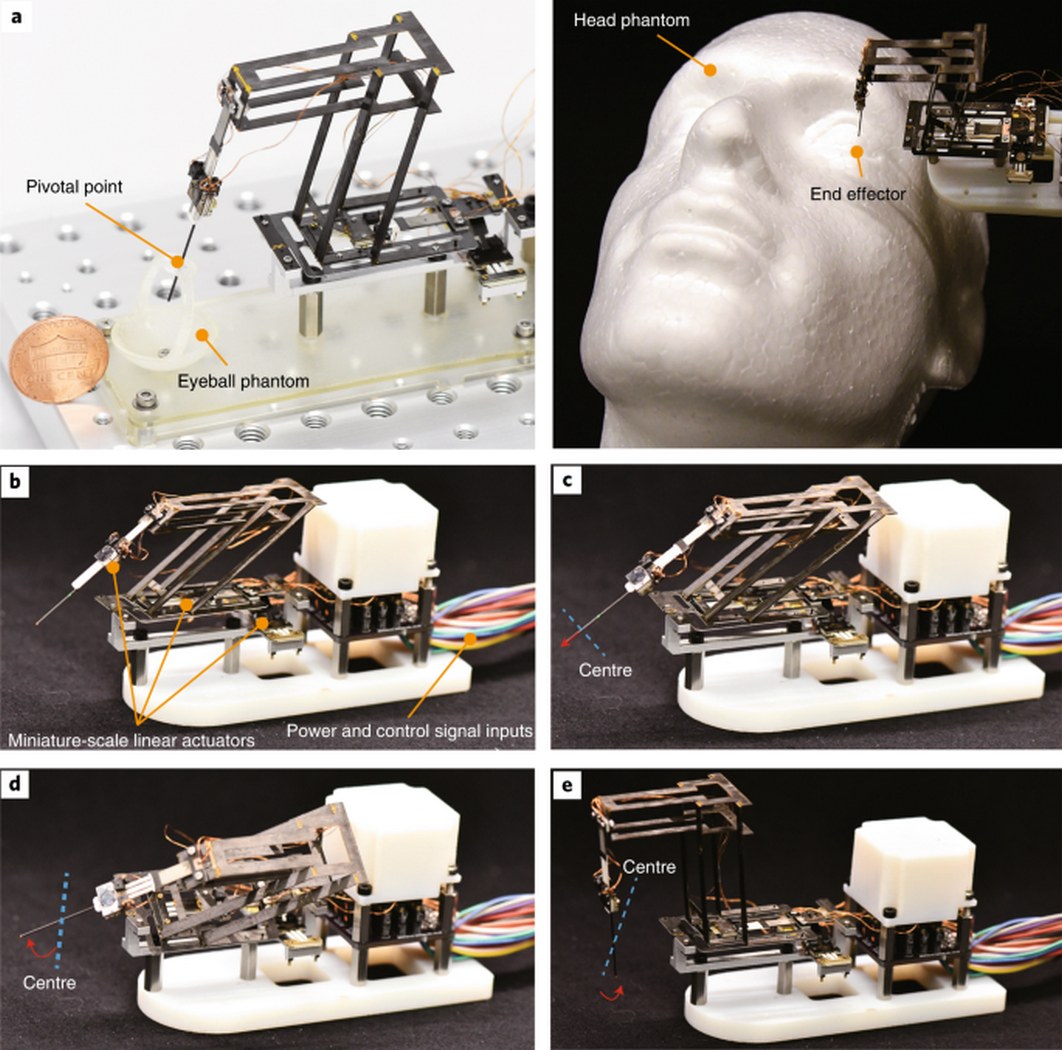
Для следующего испытания исследователи постарались сымитировать весьма кропотливую процедуру катетеризации вены сетчатки, необходимой для введения лекарственных средств в крошечные сосуды на дне глазного яблока. С этой целью они подготовили силиконовые трубки, диаметр которых был идентичен размеру вен сетчатки (примерно вдвое толще человеческого волоса). Робот-хирург успешно справился с задачей – сделал крошечные отверстия в искусственных венах при помощи закреплённой на нём иглы, не причинив нежелательных повреждений сосудов.
Помимо высокой точности и стабильности манёвров, миниатюрный робот-хирург имеет ещё одно несравненное достоинство. Ввиду малых габаритов, его легко установить и демонтировать при развитии каких-либо осложнений. Более того, в отличие от массивных робоколлег, в случае отключения электричества этот миниатюрный манипулятор с лёгкостью убирается за пределы операционного поля даже вручную. Профессор Вуд уверен, что технология Pop-Up MEMS ещё не раз окажется кстати при создании микрохирургических устройств, способных сделать операции ещё менее инвазивными и опасными для пациентов. На последующих этапах работы исследователи планируют укрепить линейные приводы, чтобы они справлялись с любыми нагрузками, которые могут встречаться в операционных. Кроме того, учёные не оставляют попыток сделать манипулятор ещё более точным путём увеличения разрешения оптических сенсоров, в частности, при помощи лазера сверхкоротких импульсов.
Источник: Origami-inspired miniature manipulator for teleoperated microsurgery / Nature Machine Intelligence