Четвероногие роботы пребывают на пике популярности как в научном мире, так и за пределами лабораторий — на производствах, в чрезвычайных ситуациях и т. п. Люди ценят их способность к передвижению в опасных и недоступных для человека локациях. Для взаимодействия с окружающим миром они используют клешни и прочие механические приспособления. Впрочем, далеко не всегда уместно применять дополнительные конечности, ведь они увеличивают массу и габариты робота, что может помешать в стеснённых обстоятельствах. Именно потому швейцарские учёные научили робопсов ANYmal управляться с уже существующими конечностями и открывать двери ногой.
Philip Arm
Исследователи из Robotic Systems Lab, действующей на базе Швейцарской высшей технической школы Цюриха, задумали решить дилемму «лишних» конечностей, натренировав своих робопсов использовать одну из четырёх ног, чтобы не только открывать ею двери, но также передвигать объекты и выполнять прочие задачи, балансируя на оставшихся трёх ногах.
Pedipulate: Enabling Manipulation Skills using a Quadruped Robot’s Leg / Philip Arm et al.Pedipulate: Enabling Manipulation Skills using a Quadruped Robot’s Leg / Philip Arm et al.
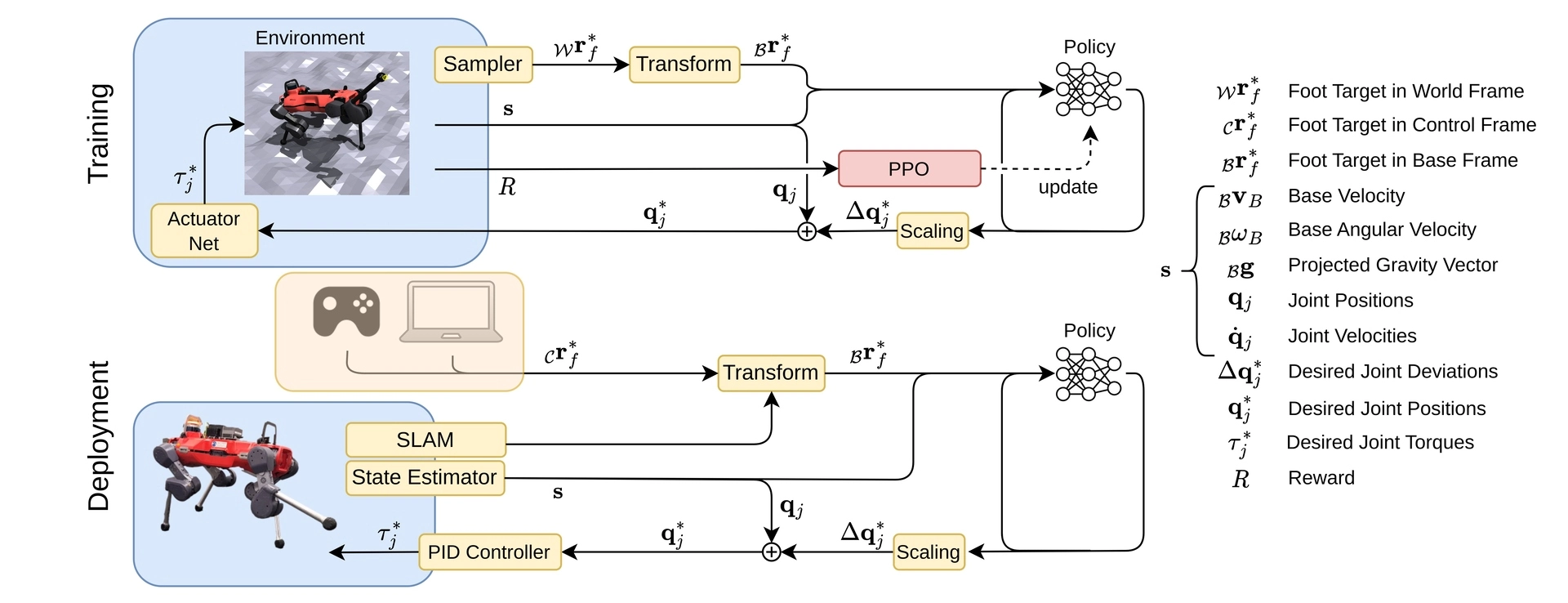
В качестве экспериментальной модели выступил робот ANYmal компании ANYbotic. Учёные задали ему серию задач, связанных с манипуляциями с окружающими объектами. Когда робот ставил переднюю «лапу» в правильное место, оптимальное для выполнения определённой задачи, исследователи инициировали алгоритм положительного подкрепления. И наоборот, если робопёс производил неловкие и потенциально опасные движения, инженеры «отфильтровывали» их при помощи отрицательного подкрепления. Таким образом ANYmal научился не просто удерживать равновесие на трёх ногах, но также передвигаться и выполнять поставленные задачи при помощи четвёртой ноги. Робот отвечал за сохранение баланса, в то время как учёные давали ему команды к действиям и движениям через контроллер.
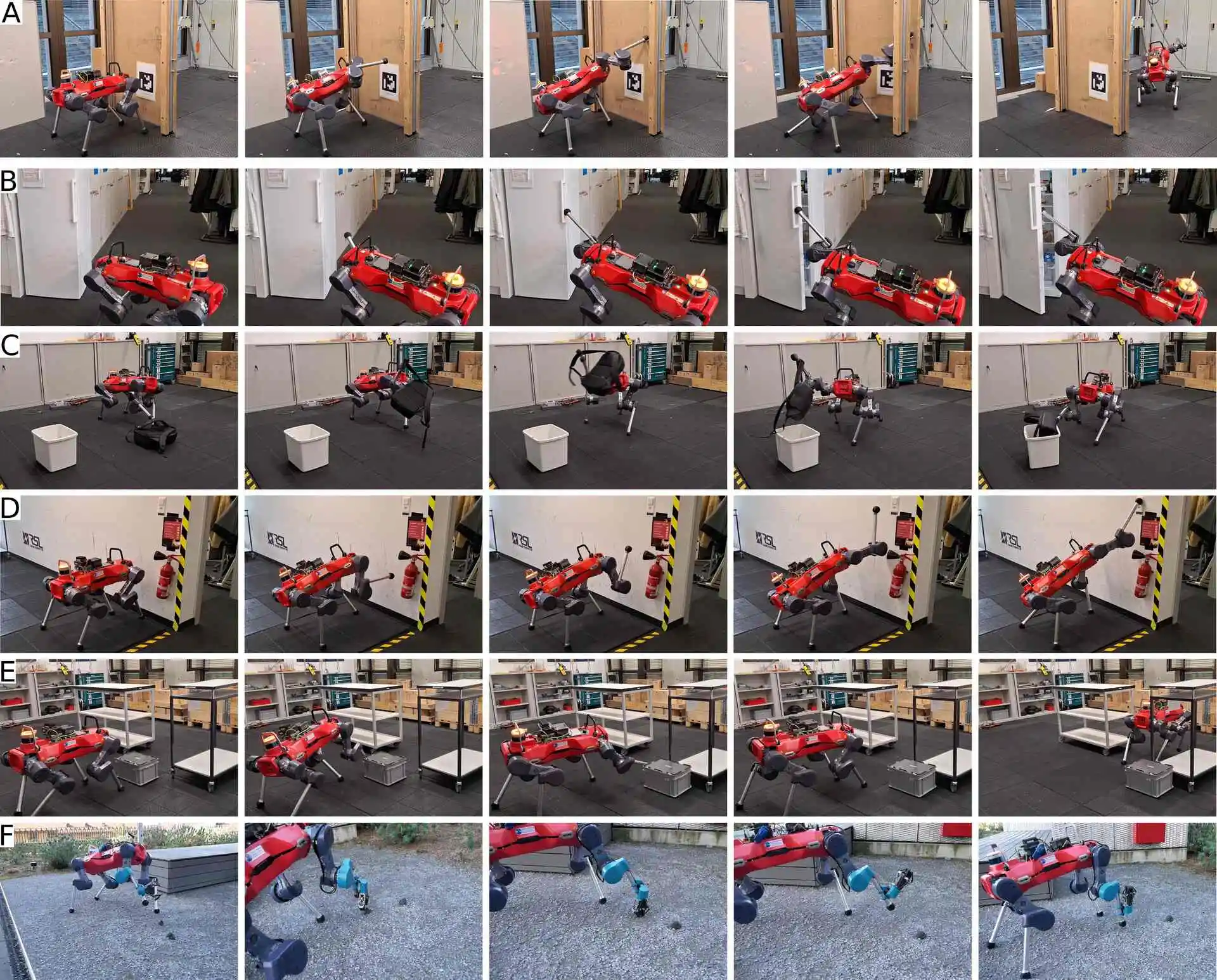
Многие видео эксперимента демонстрируют, как ANYmal медленно и максимально аккуратно поднимает ногу и протягивает её в нужную сторону, что неиронично напоминает, как обычный пёс из плоти и крови тянет ногу, чтобы облегчиться на гидрант. Помимо открытия дверей, включая двери холодильника, учёные экспериментировали с такими задачами, как подъём и перенос рюкзака в контейнер, нажатие кнопок, передвижение небольших препятствий с пути следования, сбор образцов при помощи клешни, зафиксированной на одной из рабочих ног робопса и пр. Кроме того, исследователи натренировали робота удерживать равновесие на сложных поверхностях, например, на скользкой маркерной доске. Даже поскальзываясь ANYmal сумел сохранить баланс и не свалиться, удерживая одну из ног в воздухе.
По словам инженеров, их эксперимент красочно продемонстрировал, что при должной тренировке четвероногие роботы способны выполнять многие манипуляции сугубо за счёт педипуляции, то есть взаимодействия ног с объектами. Хотя в таком виде робот становится менее эффективным, чем его собратья, вооружённые дополнительными специализированными конечностями, его сила заключается в простоте. Избегая интеграции дополнительных подвижных механизмов, можно существенно упростить конструкцию робота. Это позволит не просто уменьшить его массу и габариты, но также понизить энергопотребление системы. Всё это может оказаться чрезвычайно полезным в условиях ограниченных ресурсов, например, в поисковых операциях в зонах стихийных бедствий. В Robotic Systems Lab считают, что упор на развитие ИИ моделей, управляющих взаимодействием робопсов с окружающим миром посредством базовых конечностей, позволит сделать таких роботов более гибкими и универсальными.