Команда учёных из Китая и Германия разработала вдохновлённого грызунами робота NeRmo с подвижным гибким позвоночником и инновационной двигательно-сухожильной системой.
 Подвижность большинства четвероногих роботов вроде знаменитого робопса Spot, как правило, обусловлена сложной конструкцией многосуставных ног. Со стороны может показаться, что они достаточно правдоподобно имитируют движения млекопитающих, служащих их прототипом, однако в действительности их анатомическая схожесть заканчивается на уровне ног. Тем временем гибкость, пластичность и точность движений четвероногих животных во многом обеспечивает именно функциональный подвижный позвоночник. Воспроизвести сложные конструкции из позвонков в роботах гораздо проблематичнее, чем сложные многосуставные ноги, однако возможность интегрировать искусственные позвоночники в роботизированные дизайны открыла бы инженерам кардинально новые пути развития маневренности роботов.
Подвижность большинства четвероногих роботов вроде знаменитого робопса Spot, как правило, обусловлена сложной конструкцией многосуставных ног. Со стороны может показаться, что они достаточно правдоподобно имитируют движения млекопитающих, служащих их прототипом, однако в действительности их анатомическая схожесть заканчивается на уровне ног. Тем временем гибкость, пластичность и точность движений четвероногих животных во многом обеспечивает именно функциональный подвижный позвоночник. Воспроизвести сложные конструкции из позвонков в роботах гораздо проблематичнее, чем сложные многосуставные ноги, однако возможность интегрировать искусственные позвоночники в роботизированные дизайны открыла бы инженерам кардинально новые пути развития маневренности роботов.
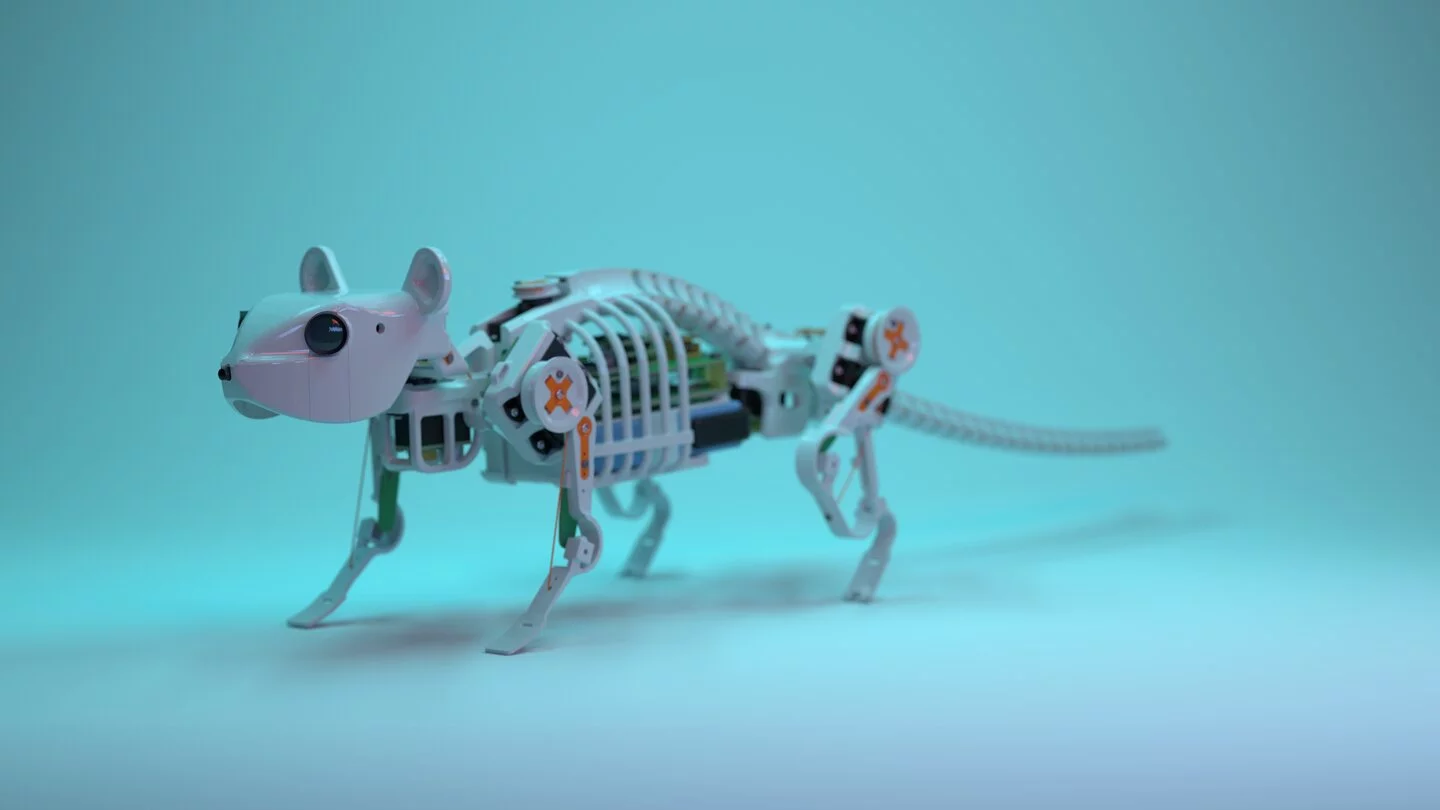
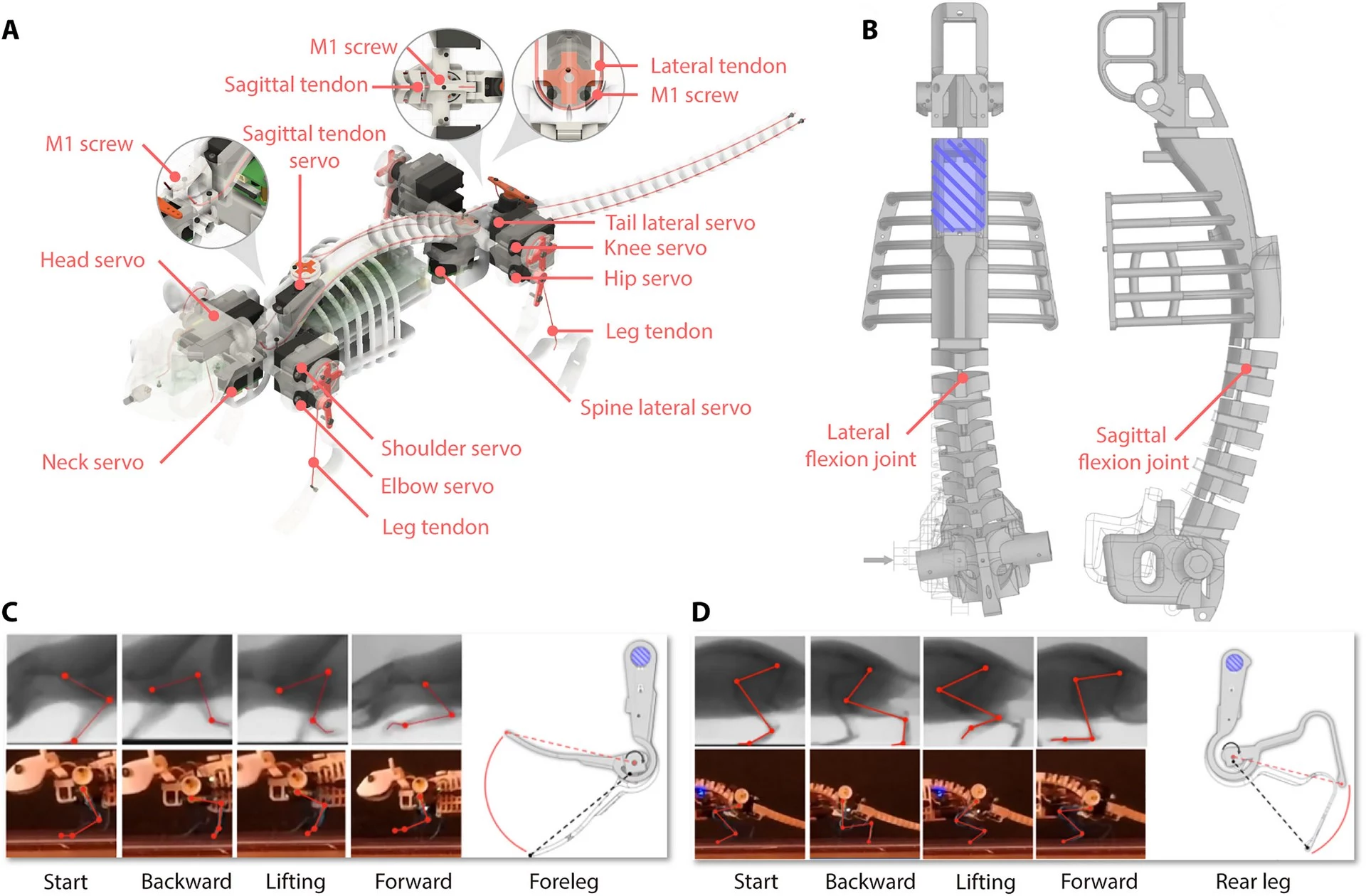
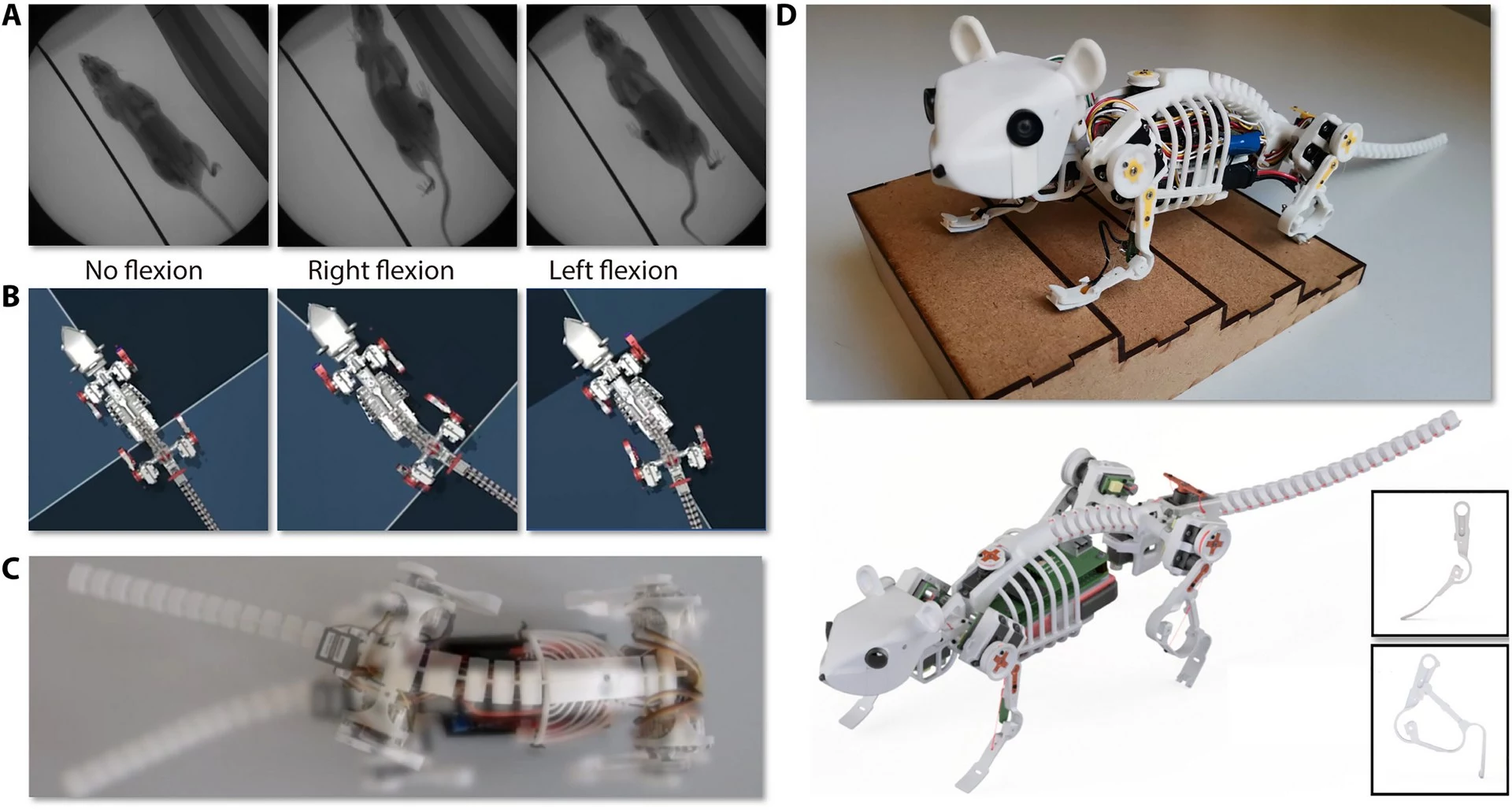 Именно это китайские и немецкие инженеры попытались реализовать в NeRmo, уделив особое внимание проработке гибкого позвоночника. Внешне его конструкция представляет собой попытку сымитировать скелетную систему мыши. Передняя часть «скелета» остаётся достаточно жёсткой, поскольку в ней содержится подавляющее большинство электроники, а вот задняя часть довольно близко повторяет поясничный отдел позвоночника грызуна с подвижными суставами. Искусственные сухожилия соединяют спину, локтевые и коленные суставы робота, придавая его движениям схожесть с ловкими и проворными движениями мыши. По словам учёных из Мюнхенского технического университета, Технического университета в Нюрнберге и Университета Чжуншань имени Сунь Ятсена, сухожильно-шкивная система NeRmo избавляет инженеров от необходимости развития сложной мышечной системы, обеспечивая при этом достаточно широкий диапазон плавных и быстрых движений в латеральной и сагиттальной плоскостях (из стороны в сторону, вверх и вниз).
Именно это китайские и немецкие инженеры попытались реализовать в NeRmo, уделив особое внимание проработке гибкого позвоночника. Внешне его конструкция представляет собой попытку сымитировать скелетную систему мыши. Передняя часть «скелета» остаётся достаточно жёсткой, поскольку в ней содержится подавляющее большинство электроники, а вот задняя часть довольно близко повторяет поясничный отдел позвоночника грызуна с подвижными суставами. Искусственные сухожилия соединяют спину, локтевые и коленные суставы робота, придавая его движениям схожесть с ловкими и проворными движениями мыши. По словам учёных из Мюнхенского технического университета, Технического университета в Нюрнберге и Университета Чжуншань имени Сунь Ятсена, сухожильно-шкивная система NeRmo избавляет инженеров от необходимости развития сложной мышечной системы, обеспечивая при этом достаточно широкий диапазон плавных и быстрых движений в латеральной и сагиттальной плоскостях (из стороны в сторону, вверх и вниз).
 Стоит отметить, что NeRmo получился неожиданно очаровательным, особенно когда учёные добавили к телу робота милую, но (пока) совершенно нефункциональную голову. Хотя концепция четвероногого робота с подвижным позвоночником всё ещё находится на начальных этапах своего развития, исследователи уверены, что интеграция подобных компонентов во всевозможных робопсов позволит существенно расширить их функционал. В качестве примера перспективности этого направления учёные назвали робота Cheetah, разработанного инженерами из Массачусетского технологического института. Добавление в его конструкцию всего одного «сустава», имитирующего сгибание позвоночника в сагиттальной плоскости, позволило ему существенно ускориться и научиться развивать скорость до 4 м/с. Тем временем в конструкции робомыши NeRmo представлено 8 таких суставов.
Стоит отметить, что NeRmo получился неожиданно очаровательным, особенно когда учёные добавили к телу робота милую, но (пока) совершенно нефункциональную голову. Хотя концепция четвероногого робота с подвижным позвоночником всё ещё находится на начальных этапах своего развития, исследователи уверены, что интеграция подобных компонентов во всевозможных робопсов позволит существенно расширить их функционал. В качестве примера перспективности этого направления учёные назвали робота Cheetah, разработанного инженерами из Массачусетского технологического института. Добавление в его конструкцию всего одного «сустава», имитирующего сгибание позвоночника в сагиттальной плоскости, позволило ему существенно ускориться и научиться развивать скорость до 4 м/с. Тем временем в конструкции робомыши NeRmo представлено 8 таких суставов.
Источник фото: Zhenshan Bing, et al.