Бывают разные ситуации, в которых не нужны быстрые и юркие роботы, однако необходимо, чтобы устройство могло преодолевать существенные расстояния без подзарядки. Миниатюрный робот MilliMobile был разработан исследователями из Вашингтонского университета именно для таких сценариев.
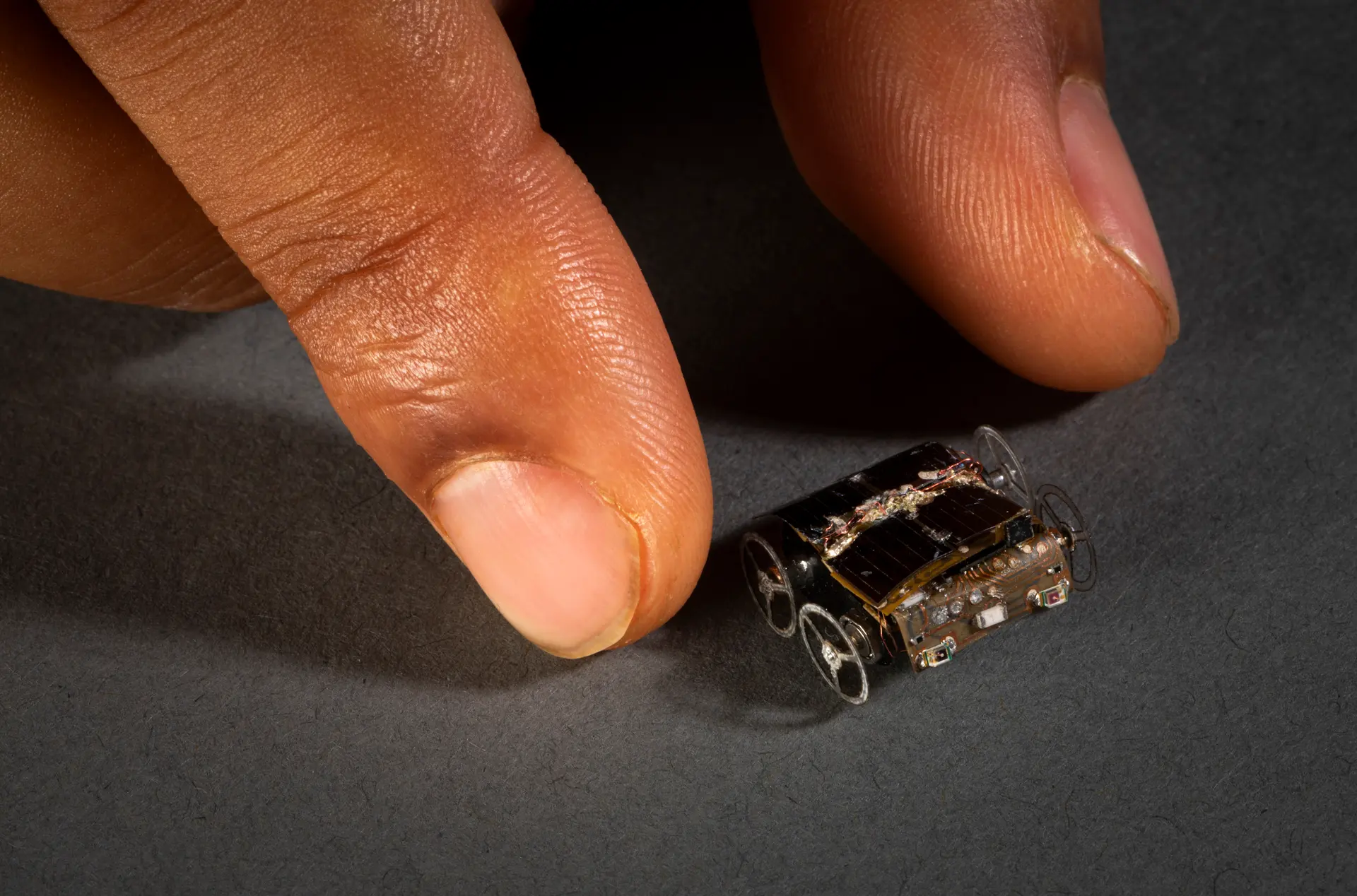
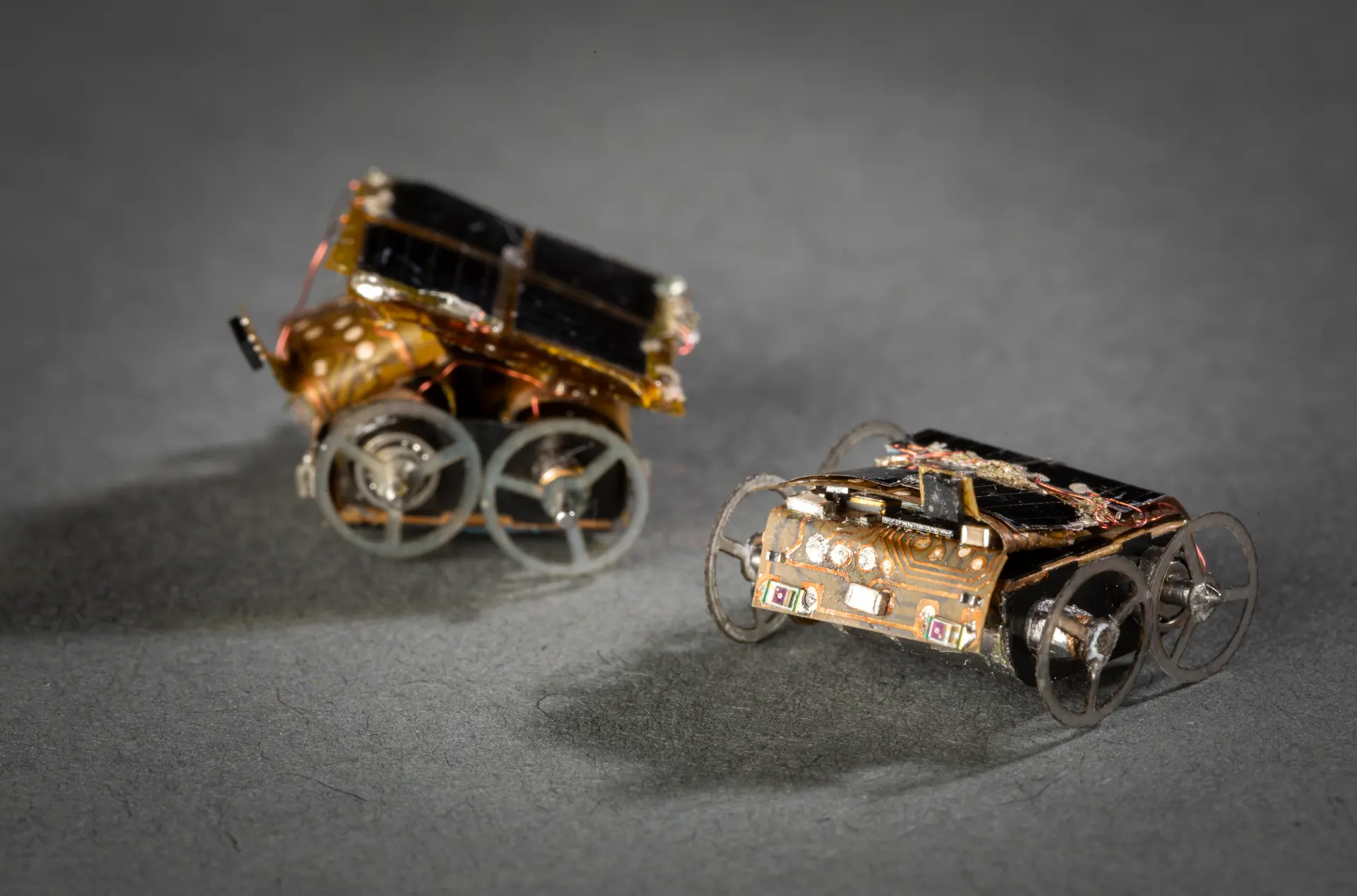
Команда инженеров создала крошечный четырёхколёсный прототип робота MilliMobile всего 10 мм шириной и весом около 1 грамма. Его конструкция не содержит аккумуляторов и состоит из стекловолоконного шасси, двух моторчиков, складной печатной платы, светового сенсора, фотоэлементов и антенны. Миниатюрный девайс может перевозить грузы втрое тяжелее собственного веса в форме дополнительных камер и сенсоров. Для передвижения по плоским поверхностям вроде разнообразных напольных покрытий, бетона, асфальта или утрамбованного грунта он собирает энергию света естественных или искусственных источников и радиоволн. По словам учёных, даже в пасмурный день он может получить достаточно энергии для преодоления около 9 метров в час. Особенность устройства заключается в том, что оно передвигается поэтапно по мере поступления энергии, а не накапливает её, чтобы преодолеть весь заданный маршрут одним махом.
По словам одного из ведущих авторов исследования Кайла Джонсона, вдохновением для такого подхода стала концепция распределённых прерывающихся вычислений, согласно которой устройства с ограниченной вычислительной мощностью и питанием могут разбить сложные программы на серию задач, выполняемых по мере освобождения ресурсов. В случае MilliMobile учёные применили ту же концепцию в отношении не вычислений, но передвижения. Используя световой сенсор, робот может автономно изменять вектор своего движения для приближения к источникам света и повышения эффективности выработки энергии. Кроме того, он умеет делиться информацией о считываемых сенсорами данных по Bluetooth. В ходе тестов он успешно передавал данные с бортовых датчиков света, температуры и атмосферной влажности. Исследователи не исключают, что в будущем несколько роботов MilliMobile смогут образовывать рабочие рои и обмениваться информацией внутри группы в беспроводном формате.