Инженеры из Калифорнийского технологического института разработали робота LEONARDO, который умеет ходить по стропам, кататься на скейтборде и летать благодаря уникальной конструкции, совмещающей в себе элементы дрона и андроида.

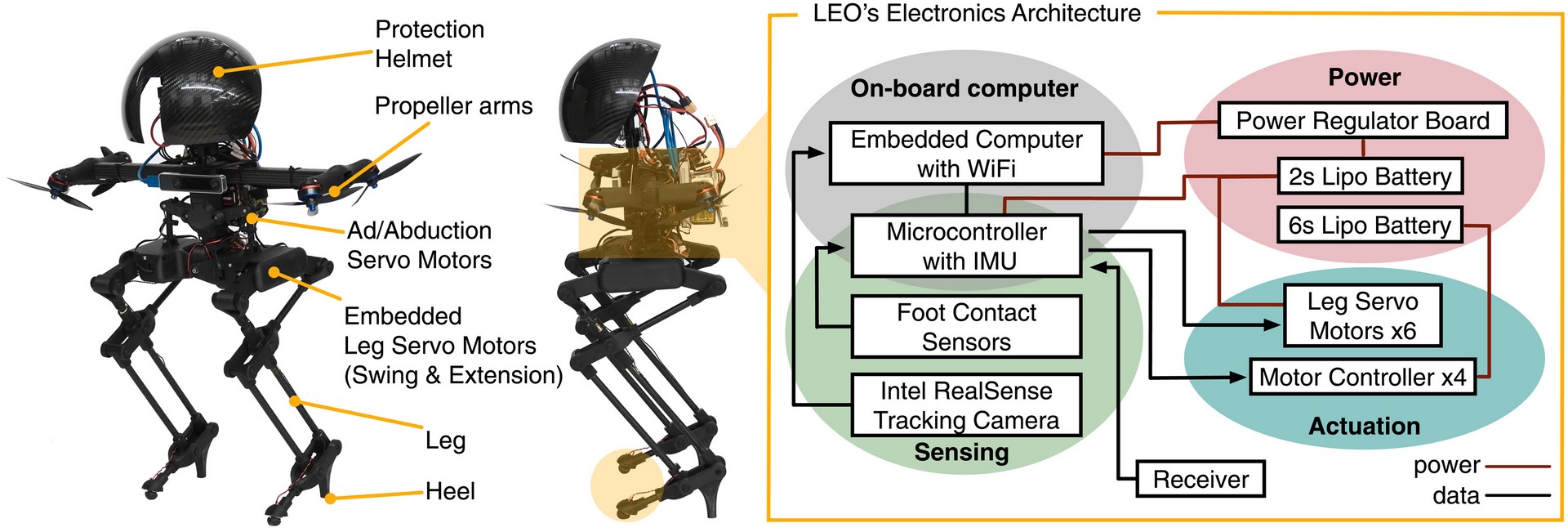
Название робота LEONARDO, также известного по прозвищу LEO, расшифровывается как «Legs Onboard Drone» – «ноги на борту дрона». Он представляет собой андроида высотой около 70 см, оборудованного двумя парами пропеллеров для дополнительной стабильности и проворности. При этом вся электроника (батареи, сенсоры и бортовой компьютер) находится в его торсе. По словам разработчиков, вдохновением для 2,6-килограммового двуногого многосуставного робота стали птицы и насекомые, которые без особых усилий переходят от полёта к ходьбе или ползанию. Для создания устройства «Legs Onboard Drone» учёным пришлось изучить, как это «переключение» режимов передвижения происходит и координируется в мозге животного. Синхронизированный контроль всех элементов LEONARDO подобен тому, как бы вёл себя человек, использующий реактивный ранец: даже в полёте он не может забывать о ногах. На этапе разработки LEO передвигается пешком со скоростью около 20 см/с, а по воздуху он может преодолевать 3-5 метров в секунду.

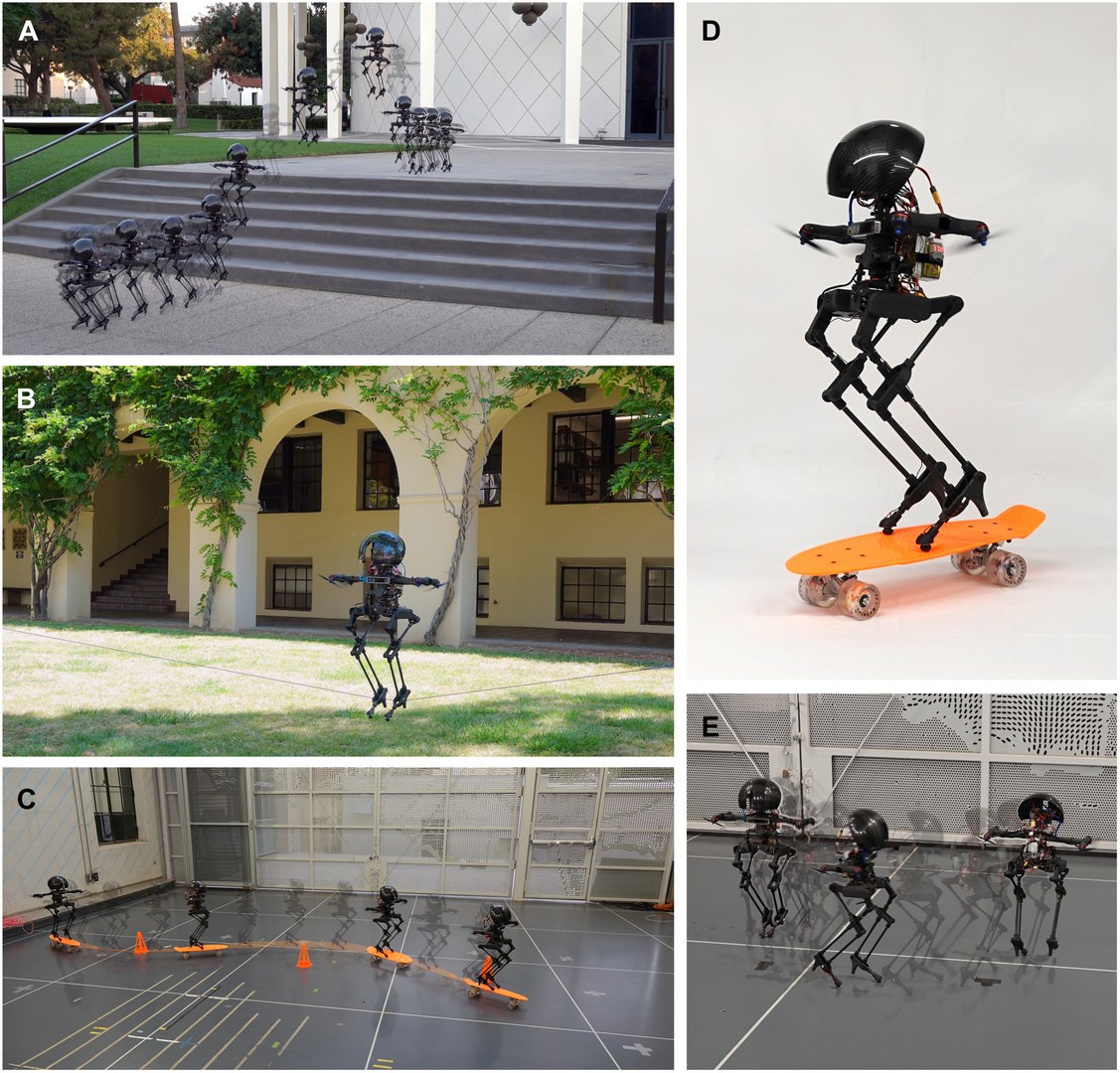
По словам инженеров, благодаря синхронизированной комбинации движений многосуставных ног и пропеллеров LEONARDO обладает завидным равновесием. В частности, совмещая отточенные движения ног и работу пропеллеров LEO справляется с задачами, которые требуют хорошей сноровки и чувства координации даже от людей. К примеру, в ходе испытаний он уже преуспел в ходьбе по стропам (слэклайне) и в езде на скейтборде. К слову, разработчики уверяют, что пропеллеры не дадут роботу потерять равновесие и упасть даже при сильных толчках.
Пока что главным недостатком LEONARDO является то, что ему приходится прибегать к использованию пропеллеров во время ходьбы, не самым рациональным способом расходуя запас энергии. В скором времени учёные планируют обновить «мозги» робота, чтобы он мог самостоятельно распределять нагрузку для ходьбы без вспомогательной силы. Вместе с тем инженеры обеспечат LEO более устойчивыми ногами и более мощными двигателями, чтобы повысить полезную нагрузку робота. Кроме того, обновлённая прошивка будет содержать в себе алгоритмы глубинного обучения для усовершенствованного контроля взлёта и посадки устройства. С их помощью робот-эквилибрист будет лучше понимать своё окружение и отталкиваться от его особенностей при принятии решений о наиболее безопасном и энергоэффективном способе передвижения.
В настоящее время LEONARDO находится на этапе совершенствования и тестирования, потому его создатели ещё не готовы назвать стоимость и сроки коммерческой реализации робота. Впрочем, они планируют начать работу с производственным партнёром уже в обозримом будущем.